什么是激光雷达相机标定?
激光雷达-相机校准建立三维激光雷达点和二维相机数据之间的对应关系,将激光雷达和相机输出融合在一起。
激光雷达传感器和相机在自动驾驶、机器人和导航等应用中广泛用于三维场景重建。激光雷达传感器捕捉环境的三维结构信息,而相机捕捉颜色、纹理和外观信息。激光雷达传感器和摄像机各自捕获各自坐标系下的数据。
激光雷达-摄像机校准包括将激光雷达传感器和摄像机的数据转换到相同的坐标系。这使您能够融合来自两个传感器的数据,并准确地识别场景中的对象。此图为融合后的数据。

激光雷达相机标定包括内禀标定和外禀标定。
内在校准-估计激光雷达传感器和相机的内部参数。
制造商提前校准激光雷达传感器的内部参数。
您可以使用
estimateCameraParameters函数估计相机的内在参数,如焦距,镜头失真和倾斜。有关更多信息,请参见单摄像机标定的例子。也可以交互式地估计相机参数使用相机校准器应用程序。
外部标定——估算激光雷达传感器和相机的外部参数,如位置、方向,以确定传感器之间的相对旋转和平移。
激光雷达和相机的外部标定
激光雷达传感器和相机的外部标定估计了它们之间的刚性变换,建立了它们坐标系之间的几何关系。这个过程使用标准的校准对象,例如带有棋盘格图案的平面板。
此图显示了使用棋盘格的激光雷达传感器和相机的外部标定过程。

外部校准的编程工作流程由这些步骤组成。或者,您也可以使用激光雷达相机校准器应用程序交互式执行激光雷达相机校准。
从摄像机和激光雷达传感器中提取棋盘的三维信息。
要从摄像机数据中提取3-D棋盘角,在世界坐标中,使用
estimateCheckerboardCorners3d函数。要从激光雷达点云数据中提取棋盘格平面,请使用
detectRectangularPlanePoints函数。
利用棋盘格角和棋盘格平面,得到由旋转组成的刚性变换矩阵R和翻译t.你可以估计刚体变换矩阵使用
estimateLidarCameraTransform函数。函数返回转换为arigidtform3d对象。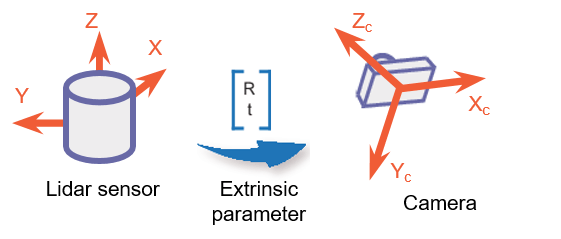

你可以使用变换矩阵:
通过计算误差来评估校准的准确性。您可以通过编程方式,使用
estimateLidarCameraTransform,或交互式地使用激光雷达相机校准器应用程序。方法将激光雷达点投射到图像上
projectLidarPointsOnImage函数,如图所示。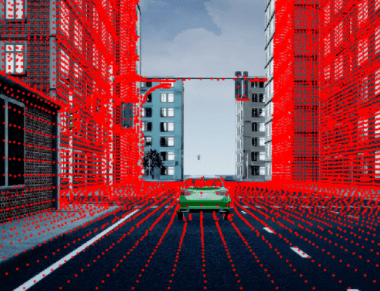
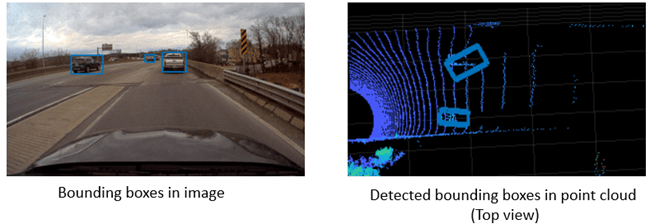
融合激光雷达和相机输出使用
fuseCameraToLidar函数。根据对应图像中的二维边界框估计点云中的三维边界框。有关更多信息,请参见利用图像标签在激光雷达中检测车辆.


参考文献
周,李普,李子墨,迈克尔·凯斯。利用直线和平面对应关系对相机和3D激光雷达进行自动外部标定。在2018 IEEE/RSJ智能机器人与系统国际会议(IROS), 5562 - 69。马德里:IEEE, 2018。https://doi.org/10.1109/IROS.2018.8593660。
另请参阅
estimateLidarCameraTransform|estimateCheckerboardCorners3d|detectRectangularPlanePoints|projectLidarPointsOnImage|fuseCameraToLidar|bboxCameraToLidar
相关的例子
更多关于
您也可以从以下列表中选择网站: