开始使用机器人系统工具箱
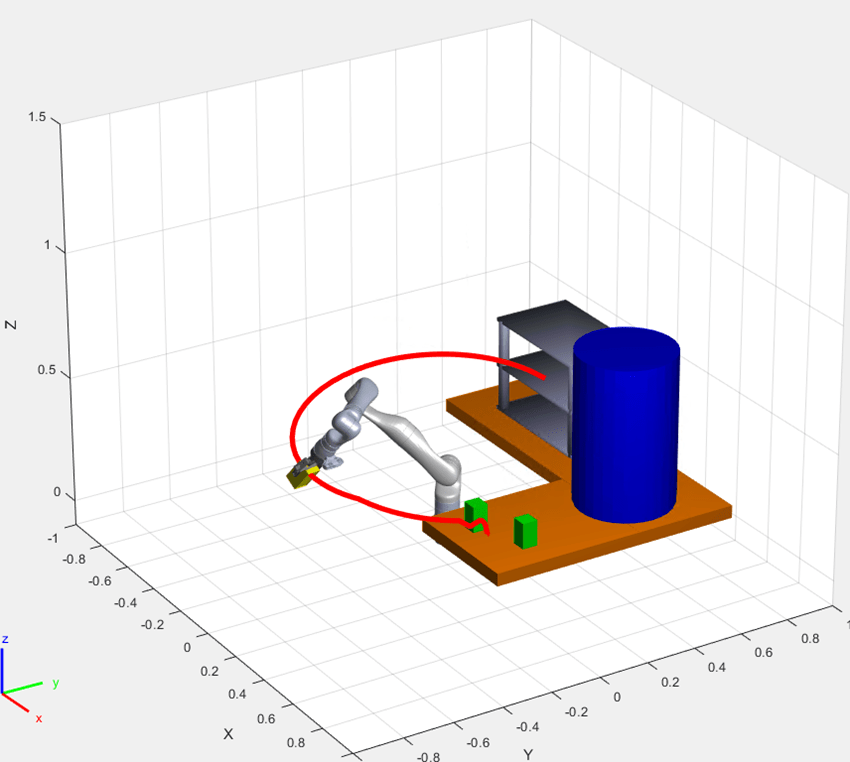
机器人系统工具箱™提供了用于设计、模拟、测试和部署机械手和移动机器人应用程序的工具和算法。对于机械手,该工具箱包括碰撞检查、路径规划、轨迹生成、正运动学和逆运动学以及使用刚体树表示的动力学算法。对于移动机器人,它包括映射、定位、路径规划、路径跟踪和运动控制的算法。该工具箱允许您构建测试场景,并使用提供的参考示例来验证常见的 工业机器人 应用程序。它还包括一个商业上可用的工业机器人模型库,您可以导入、可视化、模拟这些模型,并与参考应用程序一起使用。
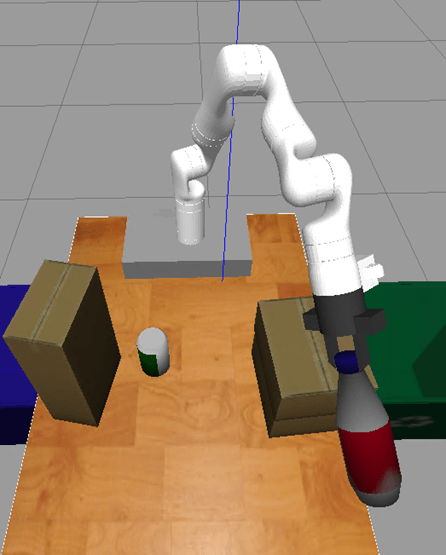
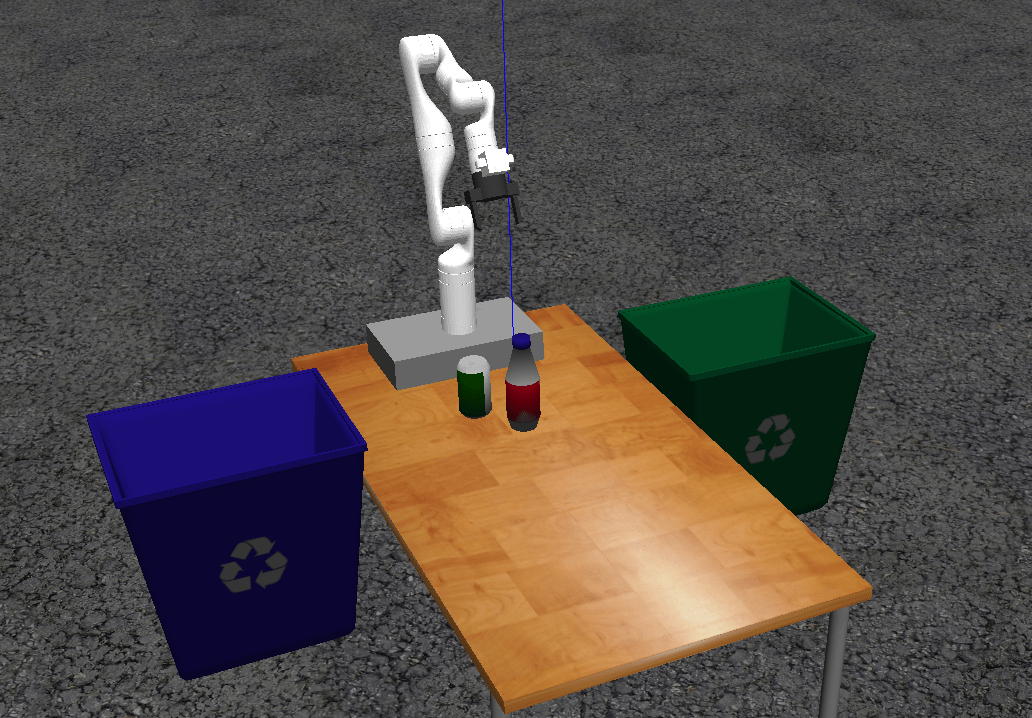
通过结合所提供的运动学和动力学模型,您可以开发一个功能性机器人原型。通过直接连接到Gazebo机器人模拟器,该工具箱可以让您共同模拟机器人应用程序。为了在硬件上验证您的设计,您可以连接到Kinova Gen3和Universal Robots UR系列机器人等机器人平台,并生成和部署代码(使用MATLAB®编码器™或动态仿真模块®编码器).
教程
- 一步一步构建机器人
本例将逐步介绍构建机器人的过程,向您展示不同的机器人组件以及如何调用函数来构建它。
- 基于逆运动学的二维路径跟踪
计算简单二维机械臂的逆运动学。
- 使用粒子滤波器跟踪一个车一样的机器人
粒子滤波是一种基于采样的递归贝叶斯估计算法
stateEstimatorPF对象。 - 差动驱动机器人的路径跟踪
这个例子演示了如何使用一个机器人模拟器来控制一个机器人沿着预定的路径前进。
- 逆运动学轨迹控制建模
这个Simulink示例演示了逆运动学块如何沿着指定的轨迹驱动机械手。
关于机器人系统
- 机器人系统工具箱的标准单元
机器人系统工具箱中使用的标准单元列表。
- 刚体树机器人模型
探讨刚体树机器人模型的结构和具体组成部分。
- 机器人动力学
本主题详细介绍了刚体机器人动力学的不同元素、性质和方程。
- 用代码生成加速机器人算法
您可以为选定的Robotics System Toolbox算法生成代码,以加速它们的执行。
- 工作空间运动模型
任务空间运动模型描述了在闭环任务空间位置控制下机械手的运动
taskSpaceMotionModel对象和任务空间运动模型块。 - 关节空间运动模型
关节空间运动模型描述了机械手在闭环关节空间位置控制下的运动
jointSpaceMotionModel对象和关节空间运动模型块。
特色的例子
您也可以从以下列表中选择网站: