感知
学习如何使用MATLAB®和仿真软件®设计机器人和无人驾驶车辆的感知系统。MathWorks的专家们分享了他们在计算机视觉、深度学习和信号处理等主题上的知识,重点是帮助机器人和无人系统了解周围的环境。本系列视频还将介绍成功使用MATLAB和Simulink进行感知的学生团队。
使用相机传感器避障学习如何在使用光流算法的前置摄像头的帮助下自动导航你的车辆通过障碍。
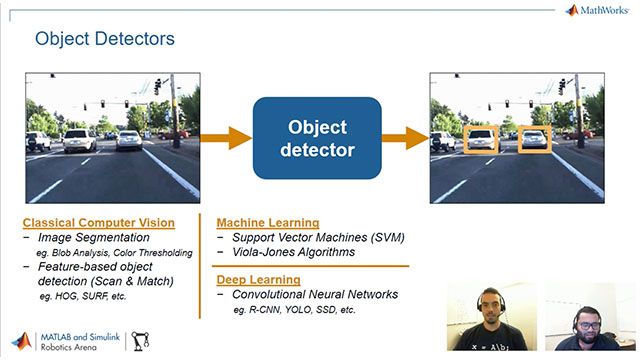
用于物体检测的地真值标记使用地面真相标签应用程序生成高质量的地面真相数据,可用于训练和评估对象探测器。
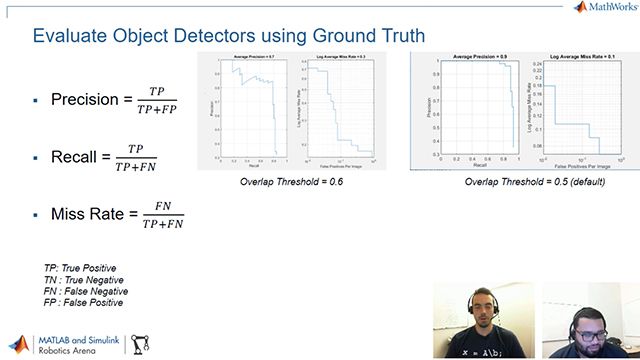
训练和验证目标检测器使用标记的地面真实数据来训练和评估目标检测器。
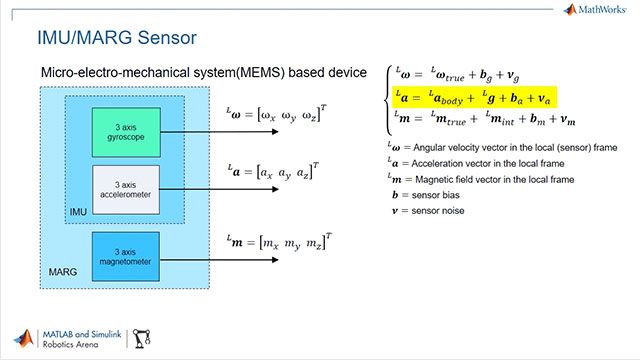
基于传感器融合的方向估计加入Roberto Valenti和Connell D’souza,他们将讨论使用传感器融合和跟踪工具箱执行传感器融合的方向估计。
用MATLAB设计数字滤波器加入Mark Schwab和Connell D’souza,因为他们演示了滤波器设计器应用程序的使用,并为数字信号处理交互式设计滤波器,可以在MATLAB或Simulink中实现。
用MATLAB估计到达方向来自Embry-Riddle航空大学机器人协会的Stephen Cronin演示了如何使用MATLAB检测水声信号到达的方向。
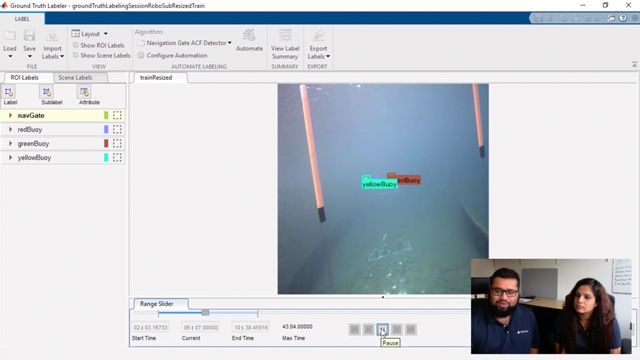
深度学习中的数据预处理学习如何调整图像的大小,创建标记训练,验证和测试数据集来训练和测试对象检测模型,Neha Goel加入Connell D’souza讨论深度学习的数据预处理。
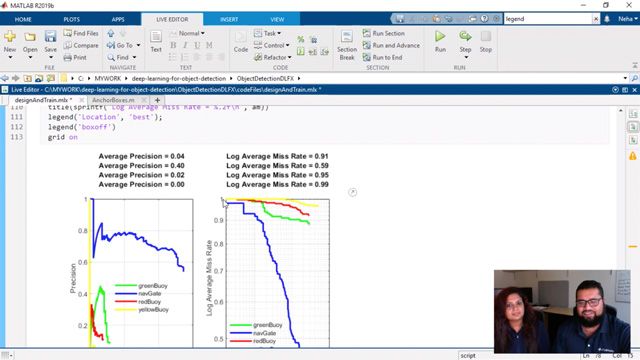
在MATLAB中设计和训练YOLOv2网络Neha Goel和Connell D’souza一起讨论YOLOv2实时目标检测神经网络的设计和训练。
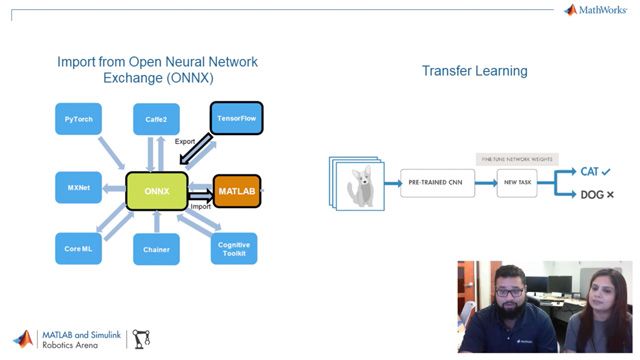
导入预训练深度学习网络到MATLAB中Neha Goel与Connell D’souza一起演示了如何使用开放神经网络交换(ONNX)将预先训练好的深度学习网络导入MATLAB并执行迁移学习。
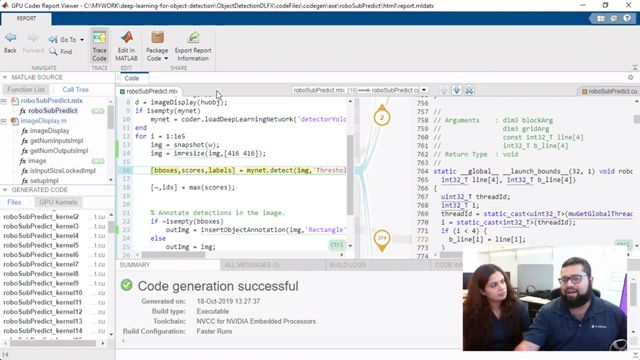
将YOLOv2部署到NVIDIA Jetson上Connell D’souza加入Neha Goel讨论如何使用GPU Coder将YOLOv2对象检测模型部署到NVIDIA Jetson上。
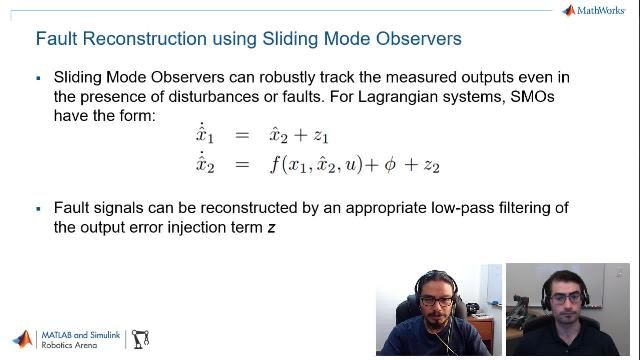
机械手质量估计通过实现基于故障的估计,可以根据现有的机器人信息重建对象的权重,在机器人操作算法中包含从被抓取对象获得的权重信息。
您也可以从以下列表中选择网站: