跨学科团队可以使用MATLAB®和仿真软件®作为贯穿整个自主水下航行器工作流程的通用集成环境。从系统工程到平台建模、环境仿真和自主算法设计,基于模型的设计可以帮助您在海试之前降低风险并建立对系统性能的信心。




执行贸易研究并开发将需求链接到Simulink模型的架构
您可以使用MATLAB和Simulink创建一个真正的数字线程,跟踪需求到系统架构,一直到实现和代码生成。这使您能够使用动力学模型(如机电系统和螺旋桨)运行贸易研究,为任务规划评估高级通信系统建模,并执行电力系统建模,以评估给定的电源约束(如电池容量或峰值负载)的系统。使用像DDS和ROS这样的中间件,组件和应用程序可以在设计成熟时共享信息并一起工作。

探索产品2022世界杯八强谁会赢?
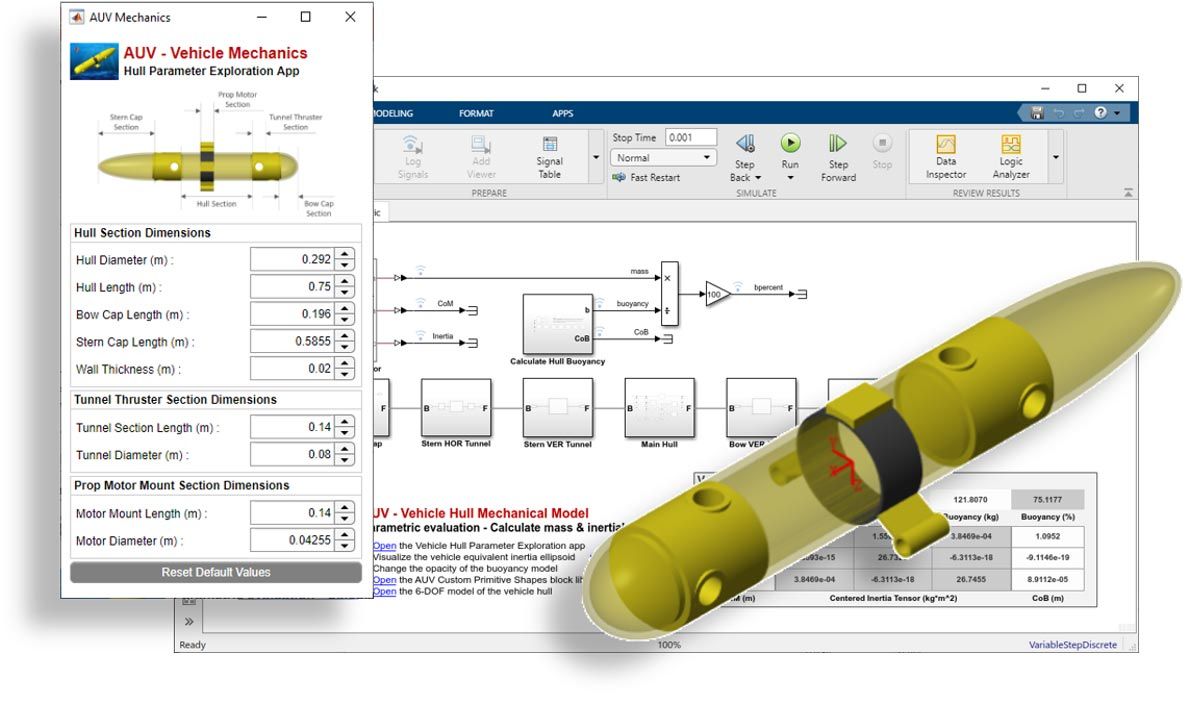
建模和可视化复杂的三维动力学和机电行为
您可以使用MATLAB和Simulink建立强大而高效的水下平台多域模型。使用Simscape™和Simscape多体™进行物理建模可以集成来自CAD模型的流体动力学、流体效应、动力学行为和惯性效应。Simscape Electrical™使您能够构建带有电子和机电组件(如电池和推进器)的电力系统模型。通过一个真实的机电工厂模型,您可以模拟部件故障并评估系统级性能。使用Simulink,您可以通过将您的植物模型连接到虚幻引擎中的低分辨率长方体环境或逼真的世界来闭合循环®模拟传感器行为,验证感知算法,并呈现结果。
探索产品2022世界杯八强谁会赢?
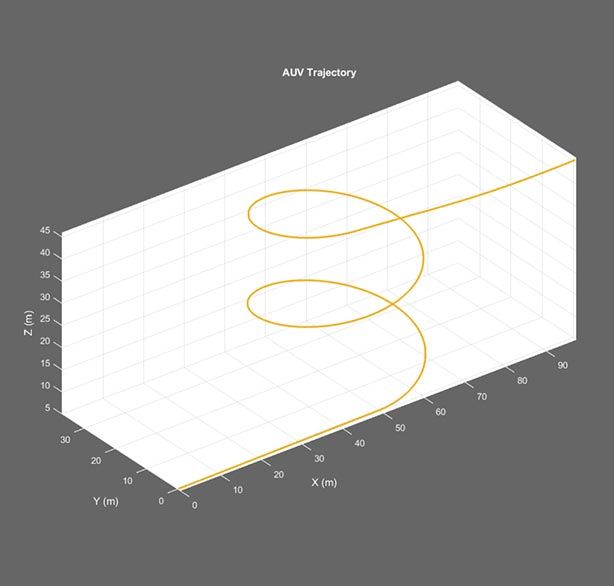
多自由度多约束控制器的设计与优化
您可以使用MATLAB和Simulink来设计、迭代和优化您的海洋车辆的运动规划和路径跟踪控制器。你可以在2D和3D中模拟车辆的运动。在三维仿真中,可以模拟和观察海洋航行器在不同轴向运动的耦合效应。在模拟运动时,你可以监控能量消耗和转弯半径等参数,并根据特定的标准优化你的运动计划。您可以将用MATLAB和Simulink设计的运动控制器直接部署到嵌入式硬件上,如微控制器和fpga。
自主算法开发与测试
您可以使用MATLAB和Simulink建模系统逻辑和评估运动规划器和算法。运动规划、定位和映射的示例帮助您开始定制解决方案,并为测试提供基准。您可以探索具有可调参数(如范围、分辨率、噪声和功率)的传感器选项之间的设计权衡。您还可以设计路径规划器,将高保真度或系统级车辆动力学考虑在内,如滚转角度和最小转弯半径。Stateflow®能够设计和开发监控、任务调度和故障管理系统。



有问题吗?
联系行业专家
您也可以从以下列表中选择网站: