分析航天飞行器的动态响应和飞行质量
Aerospace Blockset™提供飞行控制分析工具,可用于分析航空航天飞行器的动态响应和飞行质量。
飞行控制分析现场脚本——MATLAB®现场脚本演示了Sky Hogg和de Havilland Beaver机身的动态响应和飞行质量分析。
修改飞控分析模板—可以通过模板分析三自由度和六自由度机身模型的飞行质量。当你在默认的机身上运行分析时,你可以用你自己的机身替换它们并进行分析。
绘制短周期无阻尼固有频率结果—计算横向搬运质量后,使用航空航天工具箱短周期函数绘制短周期无阻尼固有频率响应。
请注意
分析机体的动力响应和飞行质量需要一种方法动态仿真模块®控制设计™许可证。
飞行控制分析现场脚本
每个飞行控制分析模板都有一个相关的MATLAB实时脚本,指导您完成默认机身的飞行质量分析工作流程。您可以与脚本交互并探索分析工作流。
DehavillandBeaverFlyingQualityAnalysis-计算德哈维兰海狸机体的纵向和横向飞行质量。
SkyHoggLongitudinalFlyingQualityAnalysis-计算Sky Hogg机身的纵向飞行质量。
有关运行实时脚本的详细信息,请参见在代码中创建并运行section.
打开其中一个模板,例如:
asbFlightControlAnalysis(6自由度)
导航到开始部分并单击第一个链接。
或者,在命令窗口中输入:
打开(“DehavillandBeaverFlyingQualityAnalysis”)
该脚本描述了如何使用特征值分析来确定在Simulink中建模的飞机的纵向飞行质量(长周期下沉模式和短周期模式)和横向飞行质量(荷兰滚转模式,滚转模式和螺旋模式)。
在运行脚本时,如果适用,运行结果将内联显示。
修改飞行分析模板
Aerospace Blockset提供了这些模板:
flightControl6DOFAirframeTemplate-该模板使用六自由度机身配置线性化和质量分析。初始化时,模板使用de Havilland Beaver机身参数。
flightControl3DOFAirframeTemplate-该模板使用三自由度纵向机身配置线性化和质量分析。初始化时,模板使用Sky Hogg机身参数。
当您可以使用默认机身导航飞行控制分析模板时,请考虑为您自己的机身模型定制模板。
飞行控制分析模板
熟悉Aerospace Blockset飞行控制分析模板:
打开其中一个模板。例如,打开一个3DOF模板:
asbFlightControlAnalysis(“3自由度”)
打开一个6DOF模板:
asbFlightControlAnalysis(6自由度)
飞行控制分析模型打开。

的分析工作流部分包含可点击的指导工作流程,以计算纵向和横向飞行质量,并将其值与MIL-F-8785C的要求进行比较。每一步都为这一步创建必要的变量。要执行飞行质量分析,请依次单击步骤中的链接。
使用模型线性器在机身模型的基本工作空间中创建一个工作点规范对象。或者,加载步骤2中提供的默认对象。
要修剪机身,单击修整机身在第三步。此操作调用
trimAirframe函数。若要使机身围绕修剪过的工作点线性化,请单击线性化机身第四步。此操作调用
linearizeAirframe函数。计算纵向飞行质量,单击计算纵向装卸质量.此操作调用
computeLongitudinalFlyingQualities函数。单击,计算横向处理质量计算横向处理质量在第6步。此操作调用
computeLateralDirectionalFlyingQualities函数。

修改飞控分析模板
当你使用3DOF和6DOF时飞行控制分析模板要修剪、线性化和计算默认机身的纵向和横向处理质量,请考虑自定义模板以包括您自己的机身。
打开一个3DOF或6DOF模板,把机身改成你自己的。例如,将模板机身更改为外部模型:
asbFlightControlAnalysis(6自由度,‘sixDOFAirframeExample’,‘DehavillandBeaver6DOFAirframe’)
命令将de Havilland Beaver子系统替换为
DehavillandBeaver6DOFAirframe模型,并将其作为引用模型包含。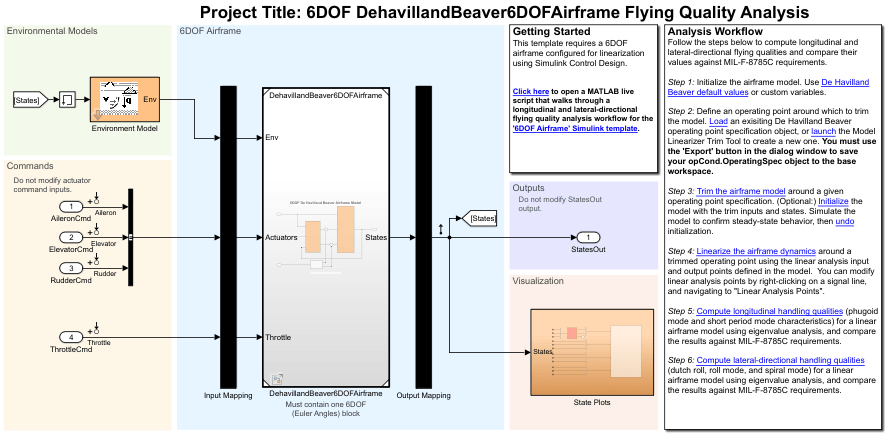
或者,在相应的画布中,手动将蓝色区域中的默认模型机身替换为自己的机身。
在画布上,使用输入映射和输出映射子系统对齐机身的输入和输出。
创建一个新的工作点规范对象。在分析工作流,执行步骤2,单击发射启动模型线性器。
为了拯救你
opCond。OperatingSpec对象添加到基本工作区,单击出口在对话框窗口中。要修剪、线性化和计算机身模型的纵向和横向处理质量,请单击工作流步骤3、4、5和6中的链接。

探索飞行控制分析功能
飞行控制分析实时脚本和模板工作流使用这些功能:
asbFlightControlAnalysistrimAirframelinearizeAirframecomputeLongitudinalFlyingQualitiescomputeLateralDirectionalFlyingQualities
为了自定义你自己的脚本来修剪机身周围的工作点,线性化机身,并计算纵向和横向的处理质量,你可以在一个工作流中使用这些函数:
方法创建飞行控制分析模板
asbFlightControlAnalysis函数。修整机身模型周围的操作点使用
trimAirframe函数。这一步创建了一个修剪过的工作点
linearizeAirframe功能要求。线性化机身模型周围的修剪工作点使用
linearizeAirframe函数。这一步创建了一个状态空间模型,该模型描述了机身模型在裁剪工作点处的线性化动力学。
计算机身的飞行质量,包括指定状态空间模型的短周期和长周期(phugoid)模式特征,使用
computeLongitudinalFlyingQualities.计算横向(荷兰式滚转、滚转和螺旋)模式特性,使用computeLateralDirectionalFlyingQualities.
例如:
asbFlightControlAnalysis (6自由度的,“DehavillandBeaverAnalysisModel”);opSpecDefault = DehavillandBeaver6DOFOpSpec(“DehavillandBeaverAnalysisModel”);opTrim =机身(“DehavillandBeaverAnalysisModel”, opSpecDefault);线性机身(“DehavillandBeaverAnalysisModel”, opTrim);lonFlyingQual = computelongitudinalflyingquality (“DehavillandBeaverAnalysisModel”, linSys) latFlyingQual = computelateraldirectionalflyingquals (“DehavillandBeaverAnalysisModel”linSys)
绘制短周期无阻尼固有频率结果
计算横向处理质量后,可绘制短周期无阻尼固有频率响应ω规划的使用shortPeriodCategoryAPlot函数。要绘制B类或C类飞行阶段,请使用shortPeriodCategoryBPlot或shortPeriodCategoryCPlot函数。本例描述如何绘制Sky Hogg模型的短周期无阻尼固有频率响应。
启动3DOF配置的飞行控制分析模板。
asbFlightControlAnalysis (3自由度的)的
3DOF天空Hogg纵向飞行质量分析项目在Simulink编辑器中启动。计算纵向和横向飞行质量,在分析工作流部分,通过引导工作流单击,单击好吧当提示。
计算完纵向和横向飞行质量后,找到并双击
lonFQ工作空间中的结构。
在变量查看器中,双击
ShortPeriodMode变量。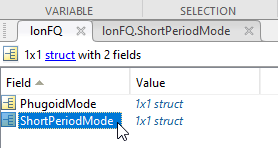
检查
wn变量的存在。的wn变量是要绘制的短周期无阻尼固有频率响应。绘制短周期无阻尼固有频率响应。在MATLAB命令窗口中,使用
shortPeriodCategoryAPlot函数。例如,对于每个攻角的载荷系数10,输入该命令。lonFQ.ShortPeriodMode.wn shortPeriodCategoryAPlot(10日,“罗”)一个图形窗口与绘制的短周期无阻尼固有频率响应显示。

要评估结果是否在您的容忍范围内,请检查红点是否在您的容忍范围内。



另请参阅
asbFlightControlAnalysis|computeLateralDirectionalFlyingQualities|computeLongitudinalFlyingQualities|linearizeAirframe|trimAirframe|shortPeriodCategoryAPlot|shortPeriodCategoryBPlot|shortPeriodCategoryCPlot|模型线性化电路(Simulink控制设计)
您也可以从以下列表中选择一个网站: