Simulink中的PID控制器整定
这个例子展示了如何自动调优PID控制器块使用PID调谐器.
PID调谐器的介绍
PID调谐器为Simulink®PID控制器块提供了一种快速和广泛适用的单回路PID整定方法。通过这种方法,您可以调优PID控制器参数,以实现具有所需响应时间的鲁棒设计。
一个典型的设计工作流PID调谐器包括以下任务:
(1)启动PID调谐器.当启动时,该软件自动从Simulink模型计算线性植物模型,并设计初始控制器。
(2)调优控制器PID调谐器通过在两种设计模式下手动调整设计标准。调谐器计算稳健性稳定系统的PID参数。
(3)将设计好的控制器参数导出回PID控制器块,在Simulink中验证控制器性能。
打开模型
打开带有PID控制器块的发动机转速控制模型,花一些时间来探索它。
open_system (“scdspeedctrlpidblock”)
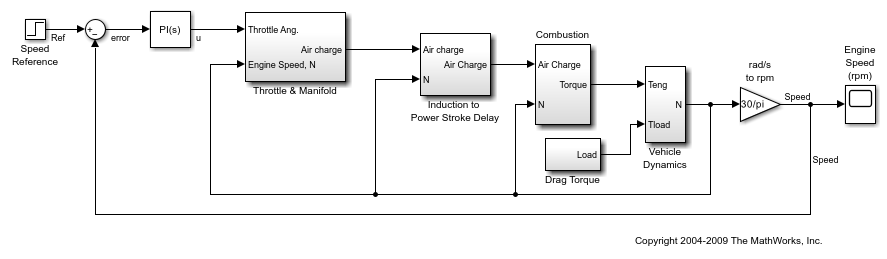
设计概述
在本例中,您将在发动机转速控制环中设计一个PI控制器。本设计的目标是跟踪来自Simulink步进块的参考信号scdspeedctrlpidblock /速度参考.设计要求为:
沉降时间小于5秒
阶跃参考输入的稳态误差为零。
在本例中,通过设计PI控制器,可以稳定反馈循环并实现良好的参考跟踪性能scdspeedctrl / PID控制器在PID调谐器.
开放的PID调谐器
启动PID调谐器,双击PID控制器块,打开其块对话框。在主要选项卡上,单击调优.

最初的PID设计
当PID调谐器启动时,软件计算控制器看到的线性化植物模型。该软件自动识别工厂的输入和输出,并使用当前的工作点进行线性化。工厂可以有任何订单,也可以有时间延迟。
的PID调谐器计算一个初始PI控制器,以实现性能和鲁棒性之间的合理权衡。默认情况下,在图中显示步骤引用跟踪性能。
下图显示PID调谐器与初始设计对话:
显示PID参数
点击显示参数查看控制器参数P和I,以及一组性能和鲁棒性度量。在本例中,PI控制器的初始设计给出了2秒的沉降时间,满足要求。

在PID调谐器中调整PID设计
参考跟踪响应的超调量约为7.5%。因为在到达沉淀时间限制之前我们还有一些空间,你可以通过增加响应时间来减少超调。将响应时间滑块向左移动以增加闭环响应时间。注意,当您调整响应时间时,响应图、控制器参数和性能测量会更新。
下图显示了一个经过调整的PID设计,超调为零,稳定时间为4秒。设计的控制器有效地成为一个积分纯控制器。


完整的PID设计与性能权衡
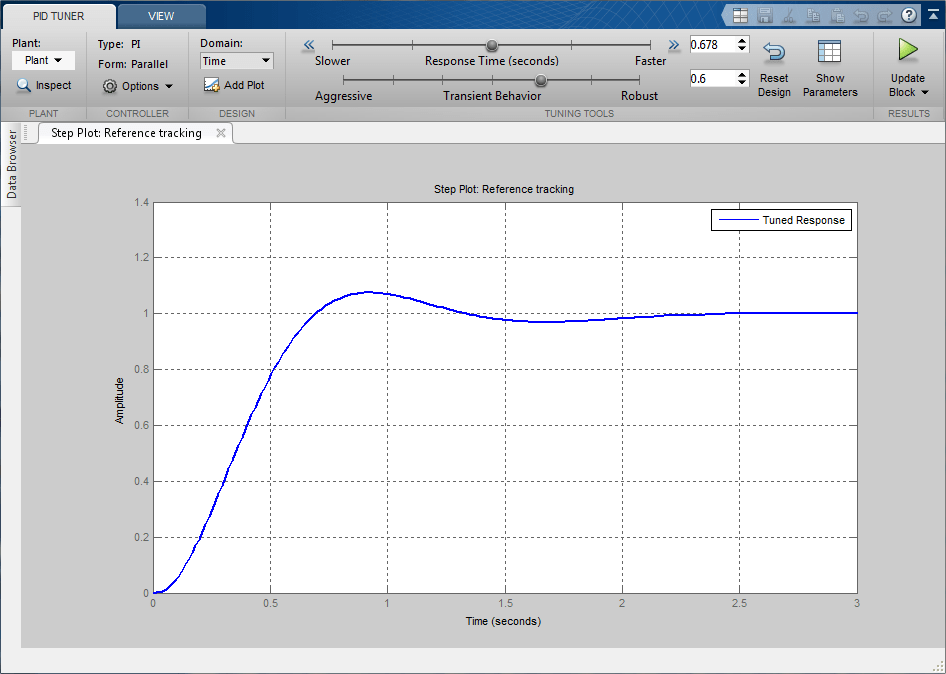
为了实现零超调,同时将稳定时间减少到2秒以下,您需要利用两个滑块。您需要使控制响应更快,以减少稳定时间和增加鲁棒性,以减少超调。例如,您可以将响应时间从3.4秒减少到1.5秒,并将健壮性从0.6增加到0.72。
下图显示了这些设置下的闭环响应:


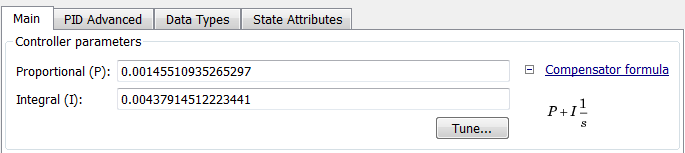
将调优参数写入PID控制器块
当你对线性工厂模型上的控制器性能感到满意后,你可以在非线性模型上测试设计。要做到这一点,单击更新块在PID调谐器.这个动作将参数写回Simulink模型中的PID控制器块。
下图是更新后的PID控制器块对话框:
完成了设计
闭环系统响应如下图所示:

结果表明,新控制器满足设计要求。
你也可以使用控制系统设计对PID控制器块进行设计,当PID控制器块属于多回路设计任务时。看这个例子单回路反馈/预滤波补偿器设计.
bdclose (“scdspeedctrlpidblock”)
另请参阅
相关的话题
您也可以从以下列表中选择网站: