开环运行,切换到闭环
当操作带有正交编码器传感器的永磁同步电机(PMSM)时,我们需要一个启动电机运行的初始位置。因为我们没有一种方法来确定开始时的初始位置(在启动电机之前),使用开环控制运行电机,并确保至少读取一次正交编码器索引脉冲。在正交编码器指数脉冲处,正交编码器传感器重置其位置以与电机的机械角度对齐。电机从开环运行切换到闭环速度控制,以保持参考速度。此步骤仅适用于正交编码器传感器(霍尔位置传感器不需要)。霍尔传感器从霍尔信号端口输入输出转子段的初始位置。
遵循以下步骤,实现开环电机运行过渡到闭环控制:
复制
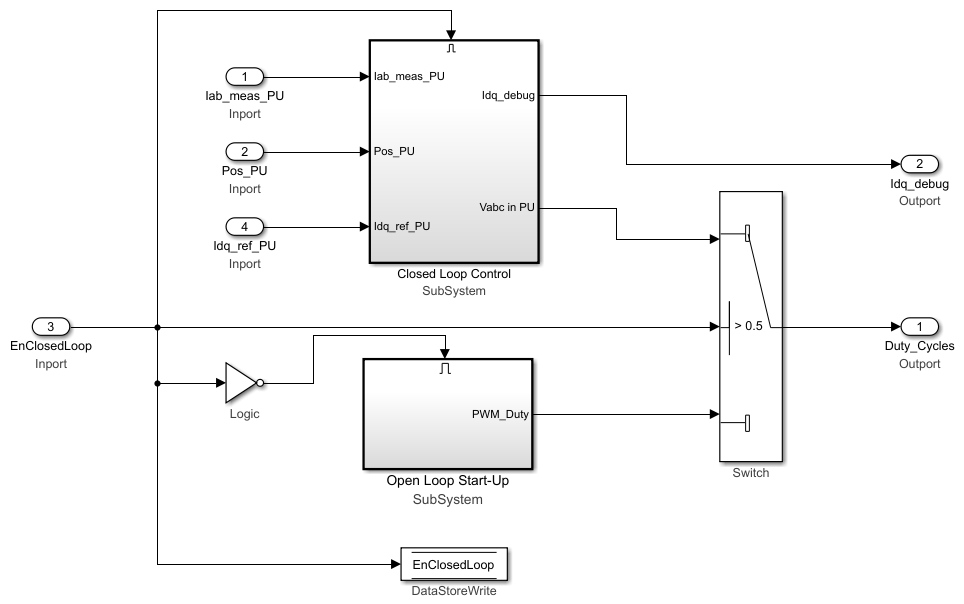
mcb_pmsm_foc_qep_f28379d /电流控制/ Control_system您的模型的子系统。这就增加了电机开环运行的算法。该子系统将控制从开环切换到闭环EnClosedLoop输入是1.添加输入端口EnClosedLoop.添加开环启动子系统补充道数据存储读取块启用而且SpeedRef.另外,添加数据存储内存块启用,EnClosedLoop,SpeedRef在模型的最高层。
当开环运行开始时,的符号SpeedRef(有关算法的详细信息,请参见开环启动子系统)决定电机的初始运行方向。如果SpeedRef为负值,则电机在开环运行期间向相反方向旋转。
复制
mcb_pmsm_foc_qep_f28379d/电流控制/输入缩放/计算位置和速度您的模型的子系统。这增加了IndexFinder您的模型的子系统。当第一次检测到正交编码器索引脉冲时,该子系统设置IndexFound港口1.添加一个输出端口(连接到IndexFound港口)计算位置和速度子系统并将其重命名为EnClosedLoop.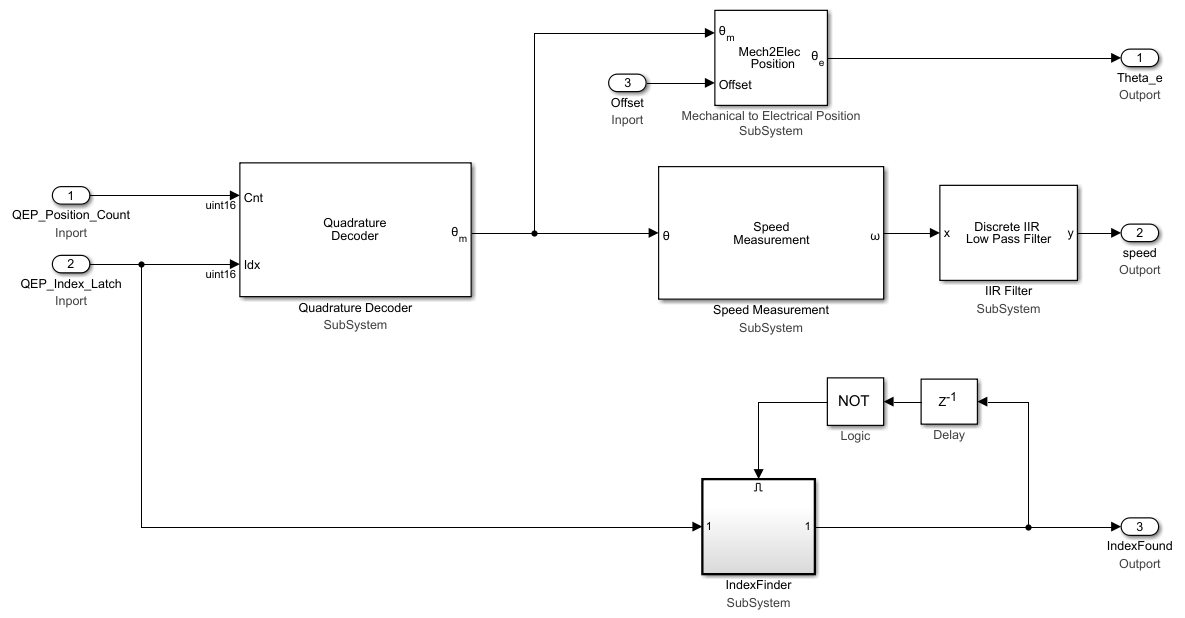
连接输出端口
EnClosedLoop从输入扩展子系统到输入端口EnClosedLoop在Control_System子系统如图所示。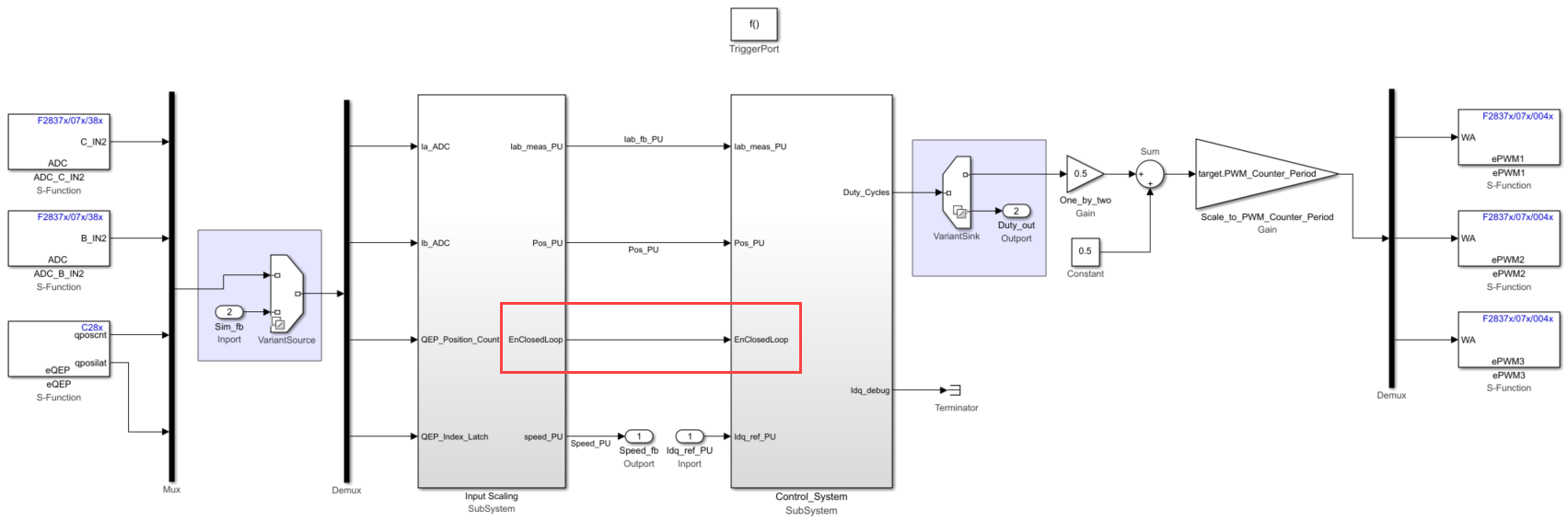
复制
mcb_pmsm_foc_qep_f28379d /速度控制/ Speed_Ref_Selector子系统到您的模型,并将其与速度控制器子系统集成。当闭环控制开始时,该子系统提供Speed_Ref输出信号。为了实现从开环到闭环的平稳过渡,测量的速度被用作开环运行时的速度参考。添加数据存储写块SpeedRef到PI_Controller_Speed输入端口。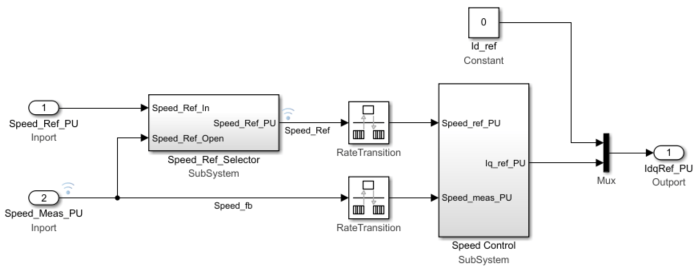
在植物模型中,添加一个步进输入来模拟IndexFinder为模拟块。将步骤输入重命名为
切换到闭环.看到mcb_pmsm_foc_qep_f28379d/逆变器和电机-工厂模型/传感器测量子系统看步进输入是如何切换到闭环的。的步进时间0.1的采样时间Ts_motor.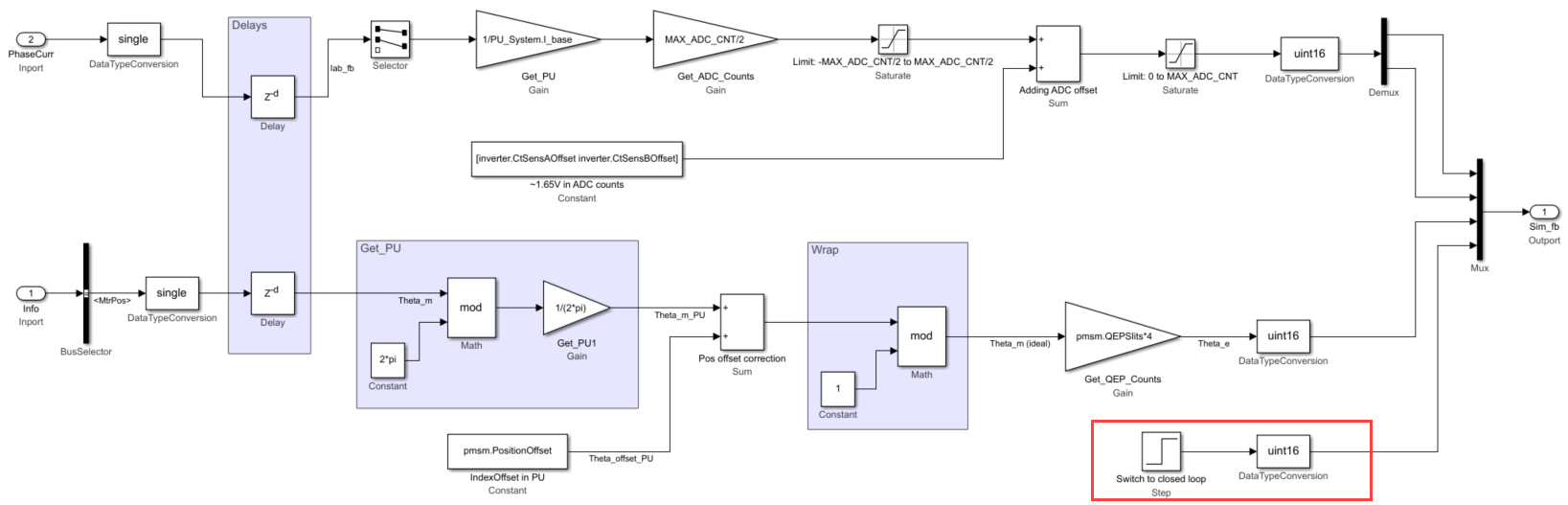
创建数据存储内存块EnClosedLoop,启用,SpeedRef.启用块用于在运行电机之前重置PI积分器。
在数据存储内存块中添加这些默认值:
启用=
1EnClosedLoop=
0SpeedRef=
0.25
的数据存储内存块用于跨子系统共享数据。
运行仿真,观察速度参考和速度反馈信号。





您也可以从以下列表中选择网站: