公园的变换
实现αβ来dq转换
- 库:
电机控制块集/控制/数学转换
描述
的公园的变换块计算静止状态下两相正交分量的Park变换αβ参考系。
该块接受以下输入:
α-β静止参考系中的轴分量。
对应变换角度的正弦和余弦值。
输出旋转时的正交直轴分量和正交轴分量dq参考系。您可以配置块以使d-或问-轴与α时间轴t= 0。
数据显示α-β的坐标轴分量αβ参照系和一个旋转dq参考框架:
的d-轴与α设在。
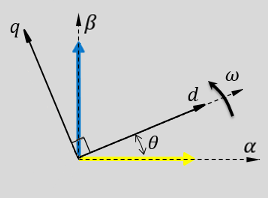
的问-轴与α设在。
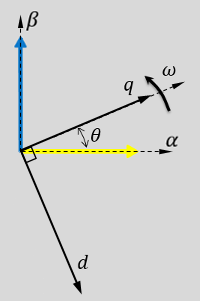
在这两种情况下,角度θ = ωt,地点:
θ是夹角α- - -d的-坐标轴d-轴对齐或α- - -问的-坐标轴问设在对齐。它表示旋转的角度位置dq关于的参考系α设在。
ω转速是dq参考系。
t是从初始对齐开始的时间,以秒为单位。


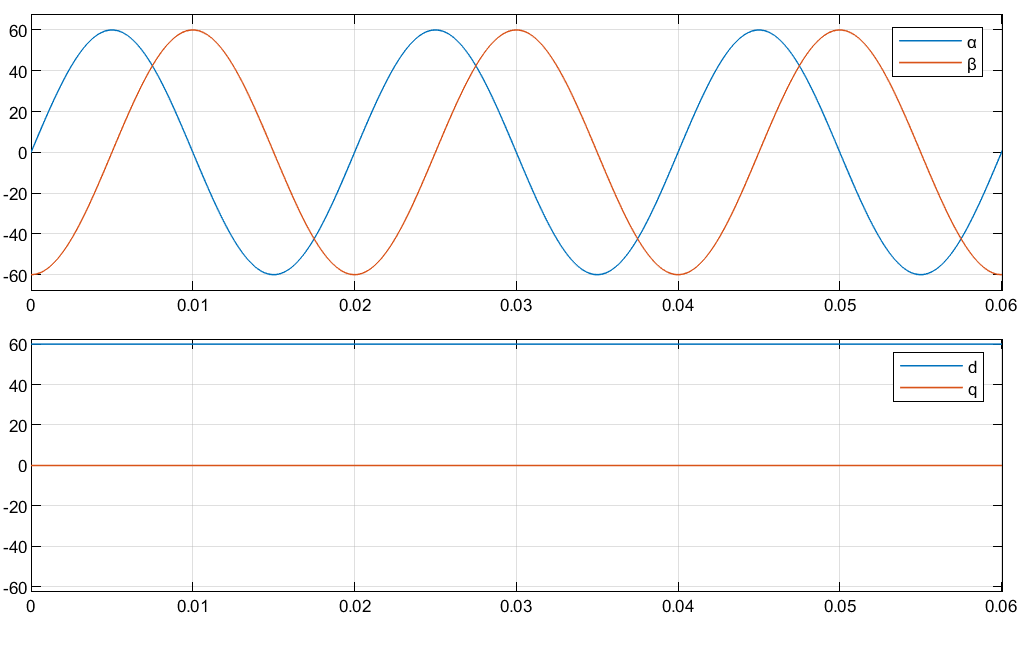
图中显示了各部件的时间响应αβ和dq下列情况下的参考系:
的d-轴与α设在。
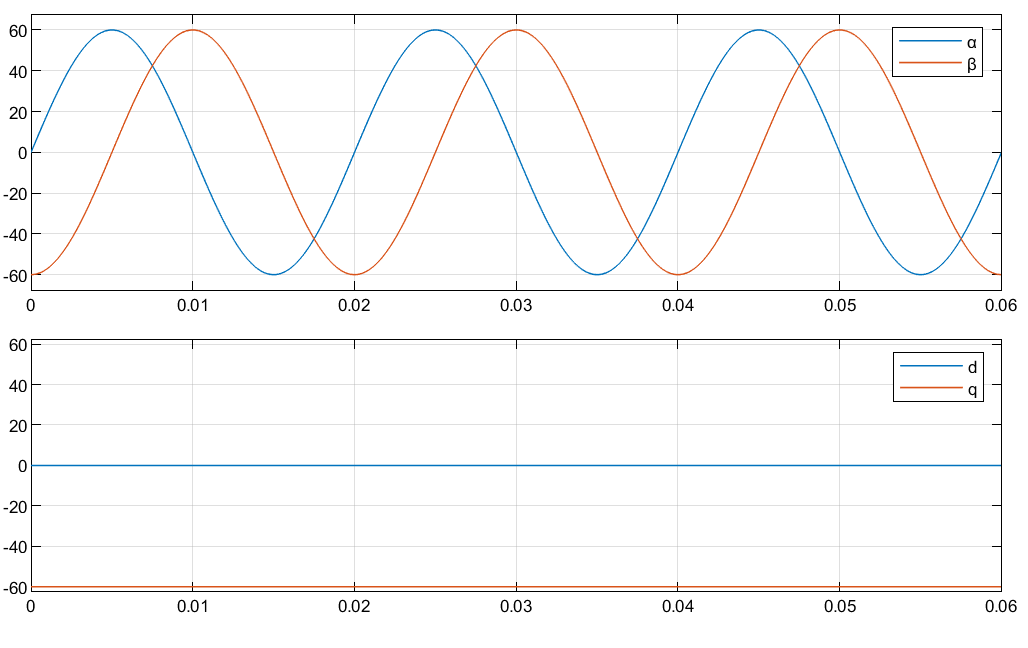
的问-轴与α设在。


方程
下面的方程描述了块如何实现Park变换。
当d-轴与α设在。
当问-轴与α设在。
地点:
和 两相正交分量在平稳中吗αβ参考系。
和 在旋转过程中,直轴和正交轴分量正交吗dq参考系。
港口
输入
输出
参数



扩展功能
版本历史
在R2020a中引入
您也可以从以下列表中选择网站: