使用系统识别应用程序识别线性模型
简介
目标
从单输入/单输出(SISO)数据中估计和验证线性模型,以找到最能描述系统动态的模型。
完成本教程后,您将能够使用系统识别应用程序完成以下任务:
从MATLAB中导入数据数组®工作区到应用程序。
图数据。
通过从输入和输出信号中去除偏移量来处理数据。
估计、验证和比较线性模型。
导出模型到MATLAB工作区。
请注意
本教程使用时域数据演示如何估计线性模型。同样的工作流程也适用于拟合频域数据。
本教程基于第17.3节中的示例系统识别:用户的理论,第二版,Lennart Ljung, Prentice Hall PTR, 1999年。
数据描述
本教程使用数据文件dryer2.mat,其中包含来自Feedback Process Trainer PT326的单输入/单输出(SISO)时域数据。输入和输出信号各自包含1000个数据样本。
该系统使用电阻丝网加热进气口的空气,类似于吹风机。输入是提供给电阻电线的功率,输出是出口的空气温度。
为系统识别准备数据
将数据加载到MATLAB工作空间
载入数据dryer2.mat在MATLAB命令窗口中输入以下命令:
负载dryer2
这个命令将数据作为两个列向量加载到MATLAB工作空间中,u2而且y2,分别。的变量u2是输入数据和y2是输出数据。
打开系统识别应用程序
要打开系统识别应用程序,在MATLAB命令窗口中输入以下命令:
systemIdentification
默认的会话名,无标题的,出现在标题栏中。

导入数据阵列到系统识别应用程序
您可以从示例数据文件导入单输入/单输出(SISO)数据dryer2.mat从MATLAB工作区导入到应用程序中。
您必须已经将示例数据加载到MATLAB中,如中所述加载数据到MATLAB工作区,打开“系统识别”应用程序打开系统识别应用程序.
如果您没有执行这些步骤,点击这里完成它们。
将数据数组导入到系统识别应用程序中:
选择导入数据>时间域数据.此操作将打开Import Data对话框。

在“导入数据”对话框中,指定以下选项:
输入——输入
u2作为输入变量的名称。输出——输入
y2作为输出变量的名称。数据名称—将默认名称修改为
数据.在导入操作完成后,该名称将在系统标识应用程序中标记数据。起始时间——输入
0作为开始时间。该值指定时间图上时间轴的起始值。样品时间——输入
0.08作为连续样本之间的时间,以秒为单位。这个值是实验中实际的采样时间。
导入数据对话框现在类似于下图。

在数据信息区域,点击更多的展开对话框并指定以下选项:
输入属性
Intersample—接受默认值
zoh(零阶保持器),表示在数据采集过程中,输入信号在样本之间是分段常数。此设置指定在离散时间和连续时间表示之间转换结果模型时,样本之间输入信号的行为。期—接受默认值
正指定一个非周期输入。请注意
对于一个周期输入,在实验中输入信号的整个周期数。
通道名称
输入——输入
权力.提示
命名通道可以帮助您识别图中的数据。对于多变量输入和输出信号,可以指定单个的名称输入而且输出通道,用逗号分隔。
输出——输入
温度.
变量的物理单位
输入——输入
W对权力的单位。提示
当有多个输入和输出时,输入以逗号分隔的列表输入而且输出每个通道对应的单位。
输出——输入
^ oC温度单位。
笔记-输入关于实验或数据的评论。例如,您可以输入实验名称、日期和实验条件的描述。当您从这些数据中估计模型时,这些模型继承了您的笔记。
展开的Import Data对话框现在类似于下图。

点击进口将数据添加到系统识别应用程序。应用程序显示一个图标来表示数据。

点击关闭关闭“导入数据”对话框。




绘制和处理数据
在本教程的这一部分中,您将评估数据并对其进行处理以进行系统标识。你可以学习如何:
图数据。
通过减去输入和输出的平均值来消除数据的偏移量。
将数据分成两部分,其中一部分用于模型估计,另一部分用于模型验证。
从每个信号中减去平均值的原因是,通常情况下,您建立的线性模型描述了偏离物理平衡时的响应。对于稳态数据,可以合理地假设信号的平均水平对应于这种均衡。因此,你可以在零附近寻找模型,而不必建模物理单位的绝对平衡水平。
您必须已经将数据导入到系统标识应用程序,如中所述导入数据阵列到系统识别应用程序.
如果您没有执行此步骤,点击这里来完成它。
绘制和处理数据:
选择时间曲线图复选框以打开时间图。如果绘图窗口为空,请单击
数据图标在系统识别应用程序。
顶部轴显示输出数据(温度),底部轴显示输入数据(功率)。输入和输出数据都有非零的平均值。
从输入数据中减去平均输入值,从输出数据中减去平均输出值。在系统识别应用程序中,选择<——预处理>删除方法.

此操作将一个新的数据集添加到具有默认名称的System Identification应用程序中
datad(后缀d意味着去趋势),并更新Time Plot窗口以显示原始数据和去趋势数据。去趋势数据的平均值为零。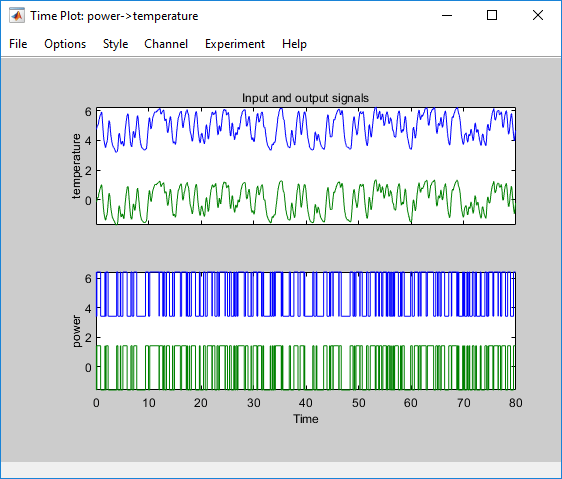
指定用于估计模型的去趋势数据。拖动数据集
datad到工作数据矩形。
另外,右击
datad图标以打开数据/模型信息对话框。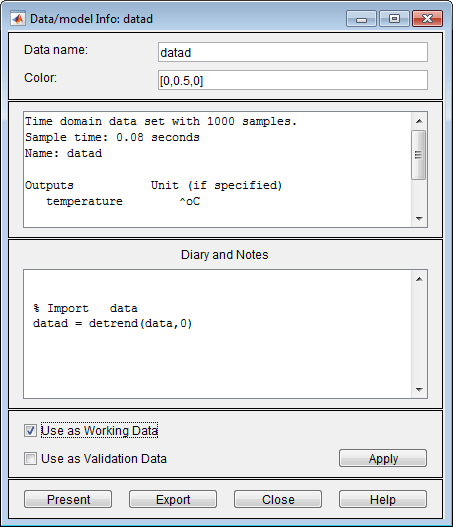
选择用作工作数据复选框。点击应用然后关闭.这一行动增加了
datad到工作数据矩形。将数据分成两部分,指定第一部分用于模型估计,第二部分用于模型验证。
选择<——预处理>选择范围打开“选择范围”窗口。

在Select Range窗口中,创建包含前500个样本的数据集。在样品字段中,指定
1 500.提示
还可以通过单击和拖动图上的矩形区域,使用鼠标选择数据示例。如果在输入通道轴上选择样本,相应的区域也会在输出通道轴上选择。
在数据名称字段,键入名称
data_est.
点击插入将此新数据集添加到系统识别应用程序中,以用于模型估计。
重复此过程以创建第二个数据集,其中包含用于验证的数据子集。在“选择范围”窗口中,指定最后500个示例样品字段。类型名称
data_val在数据名称字段。点击插入将这个新的数据集添加到系统识别应用程序中。
点击关闭关闭“选择范围”窗口。
在系统识别应用程序中,拖放
data_est到工作数据矩形,拖放data_val到验证数据矩形。
要获取关于数据集的信息,请右键单击其图标。例如,单击右键
data_est打开数据/模型信息对话框。
您也可以在数据/模型信息对话框中更改某些值,包括:
控件中数据集的名称数据名称字段。
控件中的数据图标的颜色颜色字段。您可以使用RGB值(红、绿、蓝的相对数量)指定颜色。每个值都在
0而且1.例如,(1,0,0)指示只有红色存在,没有绿色和蓝色混合到整体颜色中。控件中对该数据集执行的命令进行查看或编辑日记和笔记区域。该区域包含与使用System Identification应用程序执行的处理等效的命令行。例如,在Data/model Info: estimate窗口中显示的
data_est数据集是导入数据,对平均值去趋势化,并选择数据的前500个样本的结果。%导入数据Datad = trend(data,0) data_est = Datad ([1:50 00])有关这些命令和其他工具箱命令的更多信息,请参见相应的参考页面。










数据/模型信息对话框还显示了采样总数、采样时间、输出和输入通道名称和单位。此信息不可编辑。
学习更多的知识。有关支持的数据处理操作的信息,如重新采样和过滤数据,请参见数据进行预处理.
保存会话
处理完数据后,如绘制和处理数据,您可以删除窗口中不需要进行估计和验证的任何数据集,并保存会话。您可以稍后打开此会话,并使用它作为模型估计和验证的起点,而不必重复这些准备步骤。
您必须已经将数据处理到系统标识应用程序中,如中所述绘制和处理数据.
从会话中删除特定的数据集并保存会话。
在系统识别应用程序中:
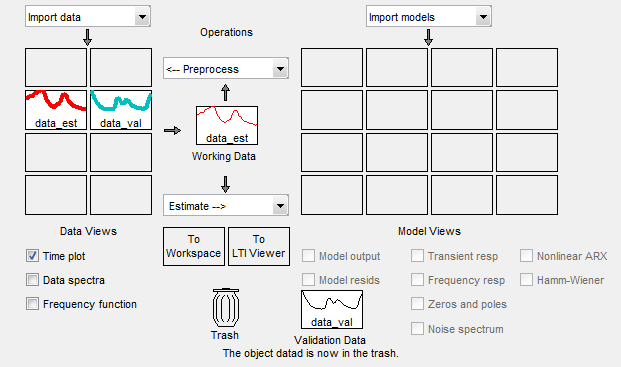
拖放
数据数据集进垃圾.拖放
datad数据集进垃圾.
您也可以按删除键将数据集移动到垃圾.
请注意
将项目移动到垃圾不删除它们。若要永久删除项目,请选择选项>空垃圾.
下图显示了将项目移动到后的系统识别应用程序垃圾.
拖放
data_est而且data_val数据集来填充空矩形,如下图所示。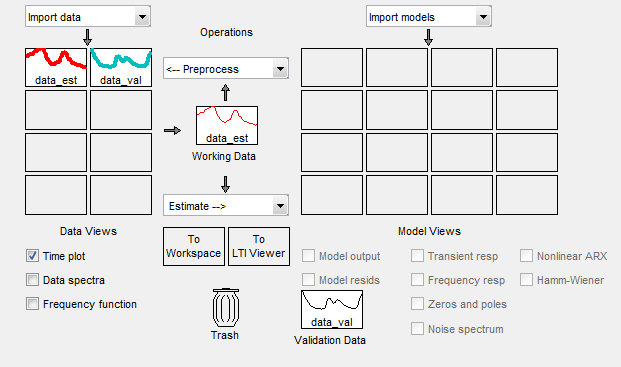
选择文件>保存会话打开“保存会话”对话框,浏览到要保存会话文件的文件夹。
在文件名称字段,输入会话的名称
dryer2_processed_data,然后单击保存.生成的文件具有.sid扩展。


提示
当启动系统识别应用程序时,您可以在MATLAB提示符下输入以下命令打开保存的会话:
systemIdentification (“dryer2_processed_data”)
有关管理会话的更多信息,请参见启动和管理会话.
使用快速入门估计线性模型
如何使用快速开始估计线性模型
您可以使用系统识别应用程序中的快速启动功能来估计线性模型。《快速入门》可能会生成您决定使用的最终线性模型,或者为您提供配置精确参数模型估计所需的信息,例如时间常数、输入延迟和谐振频率。
您必须已经处理了用于估计的数据,如中所述绘制和处理数据.
如果您没有执行此步骤,点击这里来完成它。
在系统识别应用程序中,选择估计>快速启动.
这个动作生成阶跃响应、频率响应和状态空间和多项式模型的输出的图。有关这些情节的更多信息,请参见验证快速入门模型.

快速入门线性模型的类型
快速入门估计了以下四种类型的模型,并将以下添加到系统识别应用程序的默认名称:
小鬼的一段时间内的步长响应冲动算法。spad-在一定频率范围内的频率响应水疗中心算法。频率响应是线性系统脉冲响应的傅里叶变换。默认情况下,模型按128个频率值进行评估,范围从0到Nyquist频率。
arxqs-四阶自回归(ARX)模型使用arx算法。该模型是参数化的,结构如下:
y (t)表示时间的输出t,u (t)表示时间的输入t,n一个是极点的数量,nb是b参数(等于0的个数加1),nk输入前的样本数量是否会影响系统的输出(称为延迟或死时间模型的),和e (t)是白噪声干扰。系统识别工具箱™软件估计参数 而且 使用来自估计数据集的输入和输出数据。
在
arxqs,n一个=nb= 4,nk是由阶跃响应模型估计的小鬼.n4s3-状态空间模型计算使用n4sid.算法自动选择模型顺序(在本例中为3)。该模型是参数化的,结构如下:
y (t)表示时间的输出t,u (t)表示时间的输入t,x是状态向量,和e (t)是白噪声干扰。系统识别工具箱产品估计状态空间矩阵一个,B,C,D,K.
请注意
“快速启动”选项不会创建传递函数模型或过程模型,这也是很好的启动模型类型。
验证快速入门模型
快速入门在模型估计期间生成以下图,以帮助您验证模型的质量:
阶跃响应图
频率特性图
模型输出的阴谋
您必须已经使用快速入门来估计模型来生成这些图,如中所述如何使用快速开始估计线性模型.
如果您没有执行此步骤,点击这里来完成它。
阶跃响应图。下面的阶跃响应图显示了不同模型结构和实测数据之间的一致性,这意味着所有这些结构具有相似的动力学。
提示
如果您关闭了绘图窗口,请选择短暂的分别地复选框以重新打开此窗口。如果图为空,单击System Identification应用程序窗口中的模型图标,在图上显示模型。
imp、arxqs和n4s3的步骤响应

提示
你可以用阶跃响应图来估计线性系统的死区时间。例如,前面的阶跃响应图显示了系统响应输入前大约0.25 s的时间延迟。此响应延迟,或死时间大约等于三个样本因为样本时间是0.08S表示这个数据集。
频率特性图。下面的频率响应图显示了不同模型结构和测量数据之间的一致性,这意味着所有这些结构都具有相似的动力学。
提示
如果您关闭了这个绘图窗口,请选择频率分别地复选框以重新打开此窗口。如果图为空,单击System Identification应用程序窗口中的模型图标,在图上显示模型。
型号imp, spad, arxqs和n4s3的频率响应

模型输出的阴谋。模型输出窗口显示了验证数据中不同模型结构和测量输出之间的一致性。
提示
如果您关闭了“模型输出”窗口,请选择模型输出复选框以重新打开此窗口。如果图为空,单击System Identification应用程序窗口中的模型图标,在图上显示模型。
模型imp、arxqs和n4s3的测量输出和模型输出

模型-输出图显示了模型对验证数据中输入的响应。中总结了每个模型的拟合值最适合“模型输出”窗口的区域。里面的模型最适合列表是从最上面的最好的到最下面的最差的。计算两条曲线之间的拟合时,100表示完美拟合,0表示较差拟合(即模型输出与被测输出的拟合与被测输出的平均值相同)。
在本例中,模型的输出与验证数据输出相匹配,这表明模型似乎捕获了主要的系统动态,并且线性建模是足够的。
提示
要比较预测模型输出而不是模拟输出,请从选项“模型输出”窗口中的菜单。
估计线性模型
估计精确模型的策略
你估计的线性模型使用快速入门估计线性模型结果表明,线性模型能充分表示系统的动力学。
在本部分的教程中,您可以通过执行以下任务来获得精确的参数模型:
使用简单的多项式模型结构(ARX)从数据中识别初始模型顺序和延迟。
探索更复杂的模型结构,其顺序和延迟接近您发现的初始值。
得到的模型是离散时间模型。
估计可能的模型订单
要识别黑盒模型,您必须指定模型顺序。但是,您如何知道要为您的黑盒模型指定什么模型顺序呢?要回答这个问题,您可以对一定范围的订单和延迟估计简单多项式(ARX)模型,并比较这些模型的性能。您可以选择与最佳模型拟合相对应的顺序和延迟作为初始猜测,以便使用传递函数和状态空间模型等各种模型结构进行更精确的建模。
关于ARX模型。对于单输入/单输出系统(SISO), ARX模型结构为:
y (t)表示时间的输出t,u (t)表示时间的输入t,n一个是极点的数量,nb就是0的个数加1,nk输入延迟-输入前的采样数量影响系统输出(称为延迟或死时间模型的),和e (t)是白噪声干扰。
您指定模型订单n一个,nb,nk来估计ARX模型。系统标识工具箱产品估计参数 而且 从数据。
如何估计样板订单
在系统识别应用程序中,选择估计>多项式模型打开“多项式模型”对话框。

从结构列表中,选择
ARX: [na nb nk].默认情况下,这已经被选中。编辑订单字段尝试极点、零和延迟的所有组合,其中每个值从1到10:
[1:10 1:10 1:10]
点击估计打开ARX模型结构选择窗口,该窗口显示每种模型参数组合的模型性能。
你用这个图来选择最适合的模型。

横轴是参数的总数-n一个+nb.
纵轴,叫做无法解释的输出方差(%),是模型未解释的输出部分——ARX模型对水平轴上显示的参数数量的预测误差。
的预测误差是验证数据输出与模型领先一步预测输出之间差异的平方和。
nk是延迟。
图中以绿色、蓝色和红色突出显示了三个矩形。每种颜色表示一种最佳拟合准则,如下:
红色-最佳拟合最小化验证数据输出和模型输出之间的差的平方和。这个矩形表示整体上最适合。
Green -最佳拟合最小化Rissanen MDL准则。
蓝色-最佳拟合最小化赤池AIC准则。
在本教程中,无法解释的输出方差(%)对于从4到20的参数的组合数量,值保持大致不变。这种稳定性表明模型的性能在更高的阶数下不会得到改善。因此,低阶模型同样可以很好地拟合数据。
请注意
当您使用相同的数据集进行估计和验证时,使用MDL和AIC标准来选择模型顺序。这些标准弥补了由于使用过多参数而导致的过拟合。有关这些标准的更多信息,请参见
selstruc参考页面。在ARX Model Structure Selection窗口中,点击对应的红色条(
15在横轴上),然后单击插入.这个选择插入n一个= 6,nb= 9,nk=2进入多项式模型对话框并执行估计。此操作将添加模型
arx692到系统识别应用程序,并更新图,以包括模型的响应。请注意
参数化模型的默认名称包含模型类型和极点、零点和延迟的数量。例如,
arx692是ARX模型与n一个= 6,nb=9,两个样本的延迟。在ARX Model Structure Selection窗口中,点击对应的第三条
4水平轴上的参数(最低顺序仍然很适合),然后单击插入.这个选择插入n一个=2,nb= 2,nk=3(三个样本的延迟)进入多项式模型对话框并执行估计。
该模型
arx223被添加到系统识别应用程序中,绘图将被更新以包括其响应和输出。
点击关闭关闭ARX模型结构选择窗口。
点击关闭关闭“多项式模型”对话框。



传递函数模型的识别
通过估计不同顺序组合的ARX模型,如估计可能的模型订单,您确定了极点、零和延迟的数量,为系统地探索不同的模型提供了一个很好的起点。
该系统的总体最佳拟合对应于一个具有6个极点、9个零和两个样本延迟的模型。它还表明了一个低阶模型n一个= 2(两极),nb= 2(1 0),和nk= 3(输入输出延迟)也提供了一个很好的拟合。因此,您应该探索接近这些值的模型顺序。
在本教程的这一部分中,您将估计传递函数模型。
关于传递函数模型。一般传递函数模型结构为:
Y(年代),U(年代),E(年代)分别表示输出、输入和误差的拉普拉斯变换。全国矿工工会(年代),窝(年代)表示分子和分母多项式,定义了输入和输出之间的关系。分母多项式的根称为模型波兰人.分子多项式的根称为模型0.
你必须指定极点和零的数量来估计传递函数模型。系统识别工具箱产品估计分子和分母多项式,以及从数据输入/输出延迟。
传递函数模型结构是快速估计的好选择,因为它只需要指定2个参数就可以开始:np杆子的个数和新西兰是0的个数。
如何估计传递函数模型
在系统识别应用程序中,选择估计>传递函数模型打开“传递函数”对话框。

在“估计传递函数”对话框中,指定以下选项:
极数—保持默认值
2要指定一个二阶函数,对于两个极点。数量的零—保持默认值
1.连续时间-别打这个勾。
点击延迟扩展输入/输出延迟规格区域。
通过估计不同顺序组合的ARX模型,如估计可能的模型订单,你确定了3个样本延迟(
nk = 3).此延迟转换为连续时间延迟为(nk-1) * Ts,等于0.16秒。指定延迟作为
0.16秒。离开固定检查。使用默认的评估选项。默认情况下,应用程序分配名称
tf1到模型中。对话框应该如下所示。
点击估计添加一个传递函数模型称为
tf1在“模型输出”窗口中,可以查看传递函数模型的估计输出,并将其与其他模型的估计进行比较。
提示
如果您关闭了“模型输出”窗口,您可以通过选择模型输出复选框。如果新的模型没有出现在图上,单击系统识别应用程序中的模型图标,使模型激活。
点击关闭关闭“传递函数”对话框。


学习更多的知识。要了解关于识别传递函数模型的更多信息,请参见传递函数模型.
识别状态空间模型
通过估计不同顺序组合的ARX模型,如估计可能的模型订单,您确定了极点、零和延迟的数量,为系统地探索不同的模型提供了一个很好的起点。
该系统的总体最佳拟合对应于一个具有6个极点、9个零和两个样本延迟的模型。它还表明了一个低阶模型n一个= 2(两极),nb=2(1 0),和nk=3(输入输出延迟)也提供了一个很好的拟合。因此,您应该探索接近这些值的模型顺序。
在本教程的这一部分中,您将估计一个状态空间模型。
对状态空间模型。一般状态空间模型结构(创新形式)为:
y (t)表示时间的输出t,u (t)表示时间的输入t,x (t)状态向量是时间的吗t,e (t)是白噪声干扰。
您必须指定一个整数作为模型顺序(状态向量的维度),以估计状态空间模型。系统识别工具箱产品估计状态空间矩阵一个,B,C,D,K从数据。
状态空间模型结构是快速估计的好选择,因为它只要求指定状态的数量(等于极点的数量)。您还可以选择指定延迟和馈通行为。
如何估计状态空间模型
在系统识别应用程序中,选择估计>状态空间模型打开“状态空间模型”对话框。

在指定的值场的模型结构选项卡,指定模型顺序。类型
6建立一个六阶状态空间模型。这种选择是基于这样一个事实:最适合的ARX模型有六个极点。
提示
尽管本教程估计的是六阶状态空间模型,但您可能希望探究低阶模型是否能充分表示系统动态。
对话框应该如下所示:

选择估计选项选项卡显示其他选项。
改变评估重点来
模拟优化用于输出仿真的模型。状态空间模型对话框如下图所示。

点击估计添加一个名为
魔法石,第1章到系统识别应用程序。您可以在“模型输出”窗口中查看状态空间模型的估计输出,并将其与其他模型的估计进行比较。

提示
如果您关闭了“模型输出”窗口,您可以通过选择模型输出复选框。如果新的模型没有出现在图上,单击系统识别应用程序中的模型图标,使模型激活。
点击关闭关闭“状态空间模型”对话框。




学习更多的知识。要了解关于识别状态空间模型的更多信息,请参见状态空间模型.
识别ARMAX模型
通过估计不同顺序组合的ARX模型,如估计可能的模型订单,您确定了极点、零和延迟的数量,为系统地探索不同的模型提供了一个很好的起点。
该系统的总体最佳拟合对应于一个具有6个极点、9个零和两个样本延迟的模型。它还表明了一个低阶模型n一个= 2(两极),nb=2(1 0),和nk=3也提供了很好的拟合。因此,您应该探索接近这些值的模型顺序。
在本教程的这一部分中,您将估计一个ARMAX输入输出多项式模型。
关于ARMAX模型。对于单输入/单输出系统(SISO), ARMAX多项式模型结构为:
y (t)表示时间的输出t,u (t)表示时间的输入t,n一个为动态模型的极点数,nb就是0的个数加1,nc为扰动模型的极点数,nk输入前的样本数量是否会影响系统的输出(称为延迟或死时间模型的),和e (t)是白噪声干扰。
请注意
ARMAX模型比ARX模型更灵活,因为ARMAX结构包含一个额外的多项式来建模加性扰动。
您必须指定模型订单来估计ARMAX模型。系统识别工具箱产品估计模型参数 , , 从数据。
如何估计ARMAX模型
在系统识别应用程序中,选择估计>多项式模型打开“多项式模型”对话框。
从结构列表中,选择
ARMAX: [na nb nc nk]来估计一个ARMAX模型。
在订单字段,设置命令na,注,数控,nk到以下值:
[2 2 2 2]应用程序将名称分配给模型
amx2222,默认情况下可见的名字字段。
点击估计将ARMAX模型添加到系统识别应用程序中。
重复步骤3和4使用更高订单
3 3 2 2.这些顺序产生的模型几乎和高阶ARX模型一样适合数据arx692.
提示
如果您关闭了“模型输出”窗口,您可以通过选择模型输出复选框。如果新的模型没有出现在图上,单击系统识别应用程序中的模型图标,使模型激活。
点击关闭关闭“多项式模型”对话框。


学习更多的知识。要了解更多关于识别输入输出多项式模型的信息,如ARMAX,请参见输入-输出多项式模型.
选择最佳模型
您可以通过比较型号来选择性能最好的型号。
您必须已经估计了模型,如中所描述的估计线性模型.
如果您没有执行此步骤,点击这里来完成它。
总结模型。下图显示的是系统识别应用程序,其中包括所有估计的模型估计线性模型.

检查模型输出。检查模型输出图,看看模型输出与验证数据集中的测量输出匹配程度如何。一个好的模型是最简单的模型,它最好地描述动态,并成功地模拟或预测不同输入的输出。模型是按名称列出的最适合模型输出图的面积。注意一个比较简单的模型,amx3322得出了与你创建的最高阶模型相似的拟合,arx692.

提示
如果您关闭了“模型输出”窗口,您可以通过选择模型输出复选框。如果新的模型没有出现在图上,单击系统识别应用程序中的模型图标,使模型激活。
要使用不同的数据集验证模型,可以将该数据集拖放到验证数据如果您将验证数据转换到频域,“模型输出”图将更新以显示频域的模型比较。
为了更深入地了解这些模型与数据的吻合程度,可以在感兴趣的区域周围单击并拖动一个矩形,放大图的一部分,如下图所示。

释放鼠标放大了该区域,并显示出所有模型的输出与验证数据很好地匹配。

查看模型参数
查看模型参数值
您可以查看每个估计模型的数值参数值。
您必须已经估计了模型,如中所描述的估计线性模型.
如果您没有执行此步骤,点击这里来完成它。
查询模型的参数值amx3322,右键单击系统识别应用程序中的模型图标。打开数据/模型信息对话框。

“数据/模型信息”对话框的不可编辑区域列出了对应于以下系统差分方程的参数值:
请注意
的系数u (2)和零没有明显的区别。这种差异的缺乏解释了两者延迟值的原因2而且3.给好的结果。
参数值格式如下:
ARMAX模型结构中出现的参数如下:
对应于这个一般差分方程
y (t)表示时间的输出t,u (t)表示时间的输入t,n一个为动态模型的极点数,nb就是0的个数加1,nc为扰动模型的极点数,nk输入前的样本数量是否会影响系统的输出(称为延迟或死时间模型的),和e (t)是白噪声干扰。
查看参数不确定性
您可以查看估计模型的参数不确定度。
您必须已经估计了模型,如中所描述的估计线性模型.
如果您没有执行此步骤,点击这里来完成它。查询模型的参数值amx3322,右键单击系统识别应用程序中的模型图标。打开“数据/模型信息”对话框。
单击,查看不确定参数现在在数据/模型信息对话框中,并在MATLAB提示符下查看模型信息。
amx3322 =离散时间ARMAX模型:A(z)y(t) = B(z)u(t) + C(z)e(t) A(z) = 1 - 1.502 (+/- 0.05982) z^-1 + 0.7193 (+/- 0.03483) z^-2 - 0.1179 (+/- 0.03462) z^-3 B(z) = 0.003956 (+/- 0.001551) z^-2 + 0.06245 (+/- 0.002372) z^-3 + 0.02673 (+/- 0.005622) z^-1 + 0.2355 (+/- 0.05294) z^-2名称:amx3322采样时间:0.08秒参数化:多项式阶数:na=3 nb=3 nc=2 nk=2自由系数数量:8使用"polydata", "getpvec", "getcov"表示参数及其不确定性。状态:终止条件:接近(本地)最小值,(范数(g) < tol)。迭代次数:5,函数计算次数:11使用POLYEST对时域数据“data_est”进行估计。拟合估计数据:95.3%(预测焦点)FPE: 0.001596, MSE: 0.001546模型“报告”属性中的更多信息。
模型参数的1标准差不确定度在每个参数值旁边的括号内。
将模型导出到MATLAB工作空间
您在系统识别应用程序中创建的模型在MATLAB工作区中无法自动使用。为了使模型对其他工具箱可用,Simulink®,和系统识别工具箱命令,您必须从系统识别应用程序导出您的模型到MATLAB工作区。例如,如果模型是一个需要控制器的工厂,您可以将模型从MATLAB工作区导入到控制系统工具箱™产品中。
您必须已经估计了模型,如中所描述的估计线性模型.
如果您没有执行此步骤,点击这里来完成它。
出口的amx3322模型,将其拖动到到工作空间或者,单击出口在数据/模型信息对话框中。

该模型出现在MATLAB工作区浏览器中。

请注意
这个模型是idpoly模型对象。
在模型在MATLAB工作区中之后,您可以对模型执行其他操作。例如,如果您安装了控制系统工具箱产品,您可以使用以下方法将模型转换为状态空间对象:
ss_model = ss (amx3322)
导出模型到线性系统分析器
如果安装了“控制系统工具箱”产品,则到线性系统分析仪矩形出现在系统识别应用程序。
线性系统分析仪是一个图形用户界面,用于查看和操作线性模型的响应图。显示如下图:
一步,脉冲响应
博德,奈奎斯特和尼科尔斯
频率特性奇异值
极/零
对一般输入信号的响应
从给定初始状态开始的非强制响应(仅适用于状态空间模型)
要在线性系统分析器中绘制模型,请将模型图标拖放到到线性系统分析仪或者,单击显示在线性系统分析仪在数据/模型信息对话框中。
有关在线性系统分析器中使用图的详细信息,请参见线性系统分析仪概述(控制系统工具箱).
您也可以从以下列表中选择网站: