模拟AUTOSAR基本软件服务和运行时环境
通过使用参考实现模拟AUTOSAR组件对Basic Software内存和诊断服务的调用。
配置对AUTOSAR基本软件服务的呼叫
AUTOSAR标准定义了在AUTOSAR运行时环境中运行的基本软件(BSW)服务。包括NvM (NVRAM Manager) Dem (Diagnostic Event Manager)和FiM (Function Inhibition Manager)服务。在AUTOSAR运行时环境中,AUTOSAR软件组件通常使用客户机-服务器或发送方-接收方通信访问BSW服务。
在AUTOSAR软件组件模型中,要实现对NvM、Dem和FiM服务接口的客户机调用,需要拖放预先配置的NvM、Dem和FiM调用方块。每个块都预先填充了参数,例如客户端端口名称而且操作.例如,您可以配置块参数,以选择要调用的服务操作。要在AUTOSAR软件组件中配置添加的调用程序块,需要同步模型。该软件创建AUTOSAR客户端服务接口、操作和端口,并将每个Simulink函数调用映射到AUTOSAR客户端端口和操作。有关更多信息,请参见配置对AUTOSAR NVRAM Manager服务的调用,配置对AUTOSAR诊断事件管理器服务的调用,配置对AUTOSAR功能抑制管理器服务的调用.
这里是一个油门位置集成模型,它集成了两个油门位置传感器组件和一个油门位置监视器组件。传感器组件获取原始油门位置传感器(TPS)值,并将其转换为TPS百分比值。监视器组件接受主要和次要传感器组件提供的TPS百分比值,并决定要通过哪个TPS信号。传感器组件调用BSW NvM和Dem服务,监视器组件调用BSW Dem服务。
open_system (“autosar_bsw_presim”);

传感器组件autosar_bsw_sensor1而且autosar_bsw_sensor2每个都包含一个Initialize Function块,它调用NvM服务接口NvMService.调用是使用Basic Software库块实现的NvMServiceCaller.每个块都配置为调用NvMService操作ReadBlock.的ReadBlock调用使用客户端端口S1LowSetPoint而且S2LowSetPoint.这是初始化函数块autosar_bsw_sensor1.

下面是NvMServiceCaller块对话框ReadBlock在初始化函数块中调用。有关更多信息,请参见NvMServiceCaller.

传感器组件autosar_bsw_sensor1而且autosar_bsw_sensor2每个都包含对Dem服务接口的两个调用DiagnosticMonitor.这两个调用都是使用Basic Software库块实现的DiagnosticMonitorCaller.每个块都配置为调用DiagnosticMonitor操作SetEventStatus.的SetEventStatus调用使用客户端端口S1StuckLow,S1StuckHigh,S2StuckLow,S2StuckHigh.

的diagnostics monitorcaller块对话框StuckLow调用第一个传感器组件。有关更多信息,请参见DiagnosticMonitorCaller.

监控组件autosar_bsw_monitor包含对Dem服务接口的调用DiagnosticMonitor以及对Dem服务接口的四个调用DiagnosticInfo.
在传感器组件中,a
DiagnosticMonitorCaller块实现了DiagnosticMonitor调用,并配置为调用SetEventStatus操作。客户端端口名称为TPS.这四个
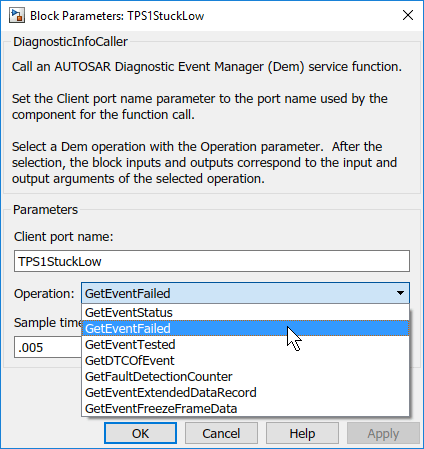
DiagnosticInfo调用是使用Basic Software库块实现的DiagnosticInfoCaller.每个块都配置为调用DiagnosticInfo操作GetEventFailed.的GetEventFailed调用使用客户端端口TPS1StuckLow,TPS1StuckHigh,TPS2StuckLow,TPS2StuckHigh.

这是DiagnosticinfoCaller的块对话框TPS1StuckLow调用。有关更多信息,请参见DiagnosticInfoCaller.
如果您有Simulink Coder和Embedded Coder软件,您可以为NvM和Dem服务调用生成C代码并导出ARXML描述。打开并构建每个组件模型。例如,建立模型autosar_bsw_monitor,打开模型。新闻Ctrl + B或输入MATLAB命令slbuild(“autosar_bsw_monitor”).
要查看模型构建的结果,请检查代码生成报告。
配置AUTOSAR仿真基础软件服务的参考实现
若要模拟调用BSW服务的AUTOSAR组件模型,请创建包含组合、系统或束模型的模型。在该包含模型中,提供组件调用的NvM、Dem和FiM服务操作的参考实现。
AUTOSAR基本软件块库包含一个NVRAM服务组件块和一个诊断服务组件块。这些块提供了NvM、Dem和FiM服务操作的参考实现。为了支持对NvM、Dem和FiM服务的组件调用的模拟,需要在包含模型中包含这些块。你可以用两种方式插入块:
通过创建一个Simulink Test线束模型自动插入块
手动地将块插入到包含组件、系统或线束模型中
要为调用BSW NvM、Dem和FiM服务的模型自动插入服务组件块,打开模型(或包含模型)并创建一个Simulink Test测试工具(需要Simulink Test)。有关更多信息,请参见创建一个测试工具(仿真软件测试).创建测试工具将编译模型,添加服务组件块,并创建模拟所需的端口和其他元素。
本示例为NvM和Dem服务调用手动插入Service Component块。打开集成模型autosar_bsw_presim.使用图书馆浏览器或add_block命令,或通过在模型窗口中输入块名称,将NVRAM和诊断服务组件块添加到模型中。
open_system (“autosar_bsw_presim”);add_block (“autosarlibnvm / NVRAM服务组件”,“autosar_bsw_presim / NVRAM服务组件”);add_block (“autosarlibdem /诊断服务组件”,“autosar_bsw_presim /诊断服务组件”);set_param (“autosar_bsw_presim”,“SimulationCommand”,“更新”);
NVRAM服务组件块有预填充的参数,包括运行时环境(RTE)参数和NVRAM属性参数。根据您使用NvM服务操作的方式,检查参数设置并考虑是否需要修改任何参数。有关更多信息,请参见NVRAM服务组件.

RTE选项卡表列出了组件客户端端口及其与NvM服务块id的映射。表中的每一行表示从Basic Software调用程序块对NvM服务的调用。作用于同一个NvM块上的调用通常使用相同的块ID。本示例映射NvMReadBlock客户端端口到不同的块id。

“初始值”选项卡表列出了用于模拟的组件客户机端口及其初始值。默认初始值为0。

诊断服务组件块具有预填充的参数,包括RTE参数和DemCounter-Based消除抖动参数。根据使用Dem服务操作的方式,检查参数设置并考虑是否需要修改。
的Counter-Based消除抖动参数控制Dem服务引用实现提供的基于计数器的反弹算法。在多次模拟运行期间,您可以调优事件步长和阈值参数并观察效果。有关更多信息,请参见诊断服务组件.

RTE选项卡表列出了组件客户端端口及其到Dem或FiM服务id的映射(在本例中为事件id)。表中的每一行表示从Basic Software调用程序块对Dem服务的调用。作用于相同事件的调用通常使用相同的事件ID。这个例子映射了DemSetEventStatus客户端端口到不同的事件id,然后映射DemGetEventFailed与共享的事件id的客户端端口SetEventStatus港口。例如,SetEventStatus港口S1StuckHigh而且GetFailedEvent港口TPS1StuckHigh共享事件ID 1;S1Stucklow而且TPS1StuckLow共享事件ID 2;等等。

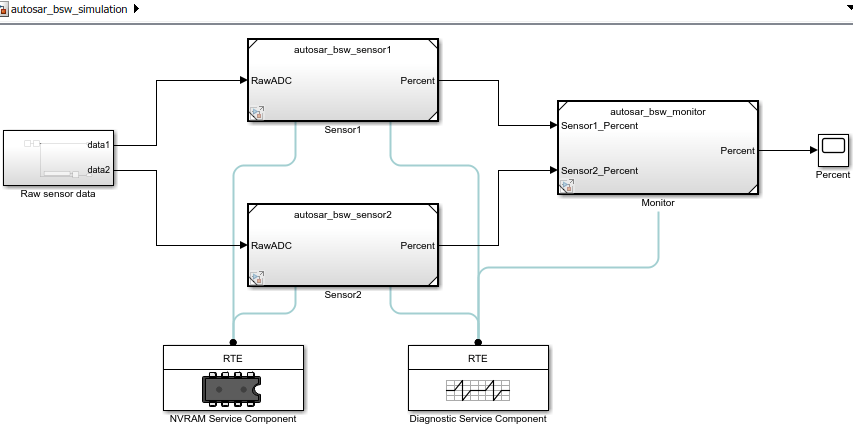
模拟对AUTOSAR NvM和Dem服务的调用
在集成模型中配置完NVRAM和诊断服务组件块后,进行模型仿真。仿真模拟了AUTOSAR NvM和Dem服务在油门位置传感器和监视器组件模型中的调用。
open_system (“autosar_bsw_simulation”);simOutIntegration = sim卡(“autosar_bsw_simulation”);
相关链接
您也可以从以下列表中选择网站: