等价消费最小化策略
P0-P4混合动力电动汽车能量管理控制器
- 库:
动力总成/推进/监控控制器

描述
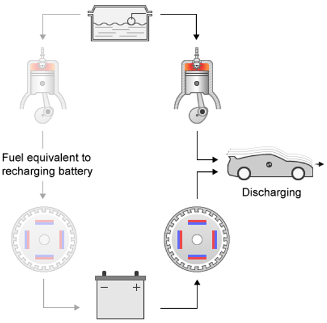
使用等价消费最小化策略(ECMS)块控制混合动力电动汽车(hev)的能源管理。该块优化了发动机和电机之间的扭矩分配,在保持电池充电状态(SOC)的同时将能源消耗降至最低。
HEV的P0, P1, P2, P3和P4参考应用使用等价消费最小化策略块混合控制。
使用电机位置参数指定HEV电机位置。

使用ecm方法参数来实现自适应或非自适应ECMS方法。HEV架构是充电持续的,这意味着电池SOC必须保持在指定的范围内,因为没有插件功能来给电池充电。电池是一个能量缓冲器,所有的能量来自于燃料,如果SOC的变化在一个驱动周期内是最小的。为了在指定的驱动周期内维持充电,块实现了这些ECMS方法中的任何一种。
| ecm方法 | 描述 |
|---|---|
|
该块使用恒定的ECMS等效因子。
|
|
该块通过使用PI控制器的输出来调整ECMS等效因子。
|
ecm控制算法
该模块实现了一个动态监控控制器,该控制器决定了发动机扭矩、电机扭矩、启动器、离合器和刹车压力命令。具体来说,布洛克:
将驾驶员加速踏板信号转换为车轮转矩请求。为了计算车轮处的总动力传动系统转矩,该算法使用了最大发动机转矩和电机转矩曲线以及变速器和差动传动比。
将驾驶员刹车踏板信号转换为刹车压力请求。该算法将制动踏板信号乘以最大制动压力。
为牵引电机实现再生制动算法,以从车辆中回收最大数量的动能。
该块实现了一个ECMS算法[2]优化了发动机和电机之间的扭矩分配,在保持电池SOC的同时将能耗降至最低。具体来说,ecm:
给电能分配成本,这样使用储存的电能就等于消耗燃料能量。
电池模式 等价的电能 描述 卸货
积极的
当电机使用时,电池释放储存的电能。
充电
负
电池储存的电能来自:
发动机和电机作为发电机
在再生制动过程中充当发电机的电机

是软件在每个控制器时间步上求解的一种瞬时极小化方法。为了实现该策略,ECMS在优化策略中选择最优的电机和发动机转矩,使等效能耗最小。
实现自适应或非自适应ECMS方法。


港口
输入
输出
参数
电机位置-电机位置
P0(默认)|P1|P2|P3|P4
指定HEV电机位置。
ecm方法- ecm方法
非自适应的(默认)|自适应
使用ecm方法参数来实现自适应或非自适应ECMS方法。HEV架构是充电持续的,这意味着电池SOC必须保持在指定的范围内,因为没有插件功能来给电池充电。电池是一个能量缓冲器,所有的能量来自于燃料,如果SOC的变化在一个驱动周期内是最小的。为了在指定的驱动周期内维持充电,块实现了这些ECMS方法中的任何一种。
| ecm方法 | 描述 |
|---|---|
|
该块使用恒定的ECMS等效因子。
|
|
该块通过使用PI控制器的输出来调整ECMS等效因子。
|
差动齿轮传动比,N_diff-差动传动比
3.32(默认)|标量
差速齿轮比率。没有尺寸。
数据类型:双
微分效率因子-差动效率因子
0.98(默认)|标量
微分效率的因素。没有尺寸。
数据类型:双
载轮半径,Re-载轮半径
0.327(默认)|标量
负载轮半径,单位为m。
数据类型:双
传输效率的因素-传动效率因素
齿轮,输入扭矩,输入速度和温度(默认)|齿轮只
传输效率的因素。
数据类型:双
变速器齿轮数矢量,G_trans-传动齿轮数矢量
[0 1 2 3 4 5 6](默认)|向量
传动齿轮数矢量。没有尺寸。
数据类型:双
传动传动比矢量,N_trans-传动传动比矢量
[1 4.212 2.637 1.8 1.386 1 0.772](默认)|向量
传动传动比矢量。没有尺寸。
数据类型:双
传输效率矢量,eta_trans-传输效率矢量
[1 1 1 1 1 1 1](默认)|向量
传输效率向量。没有尺寸。
依赖关系
若要启用此参数,请设置传输效率的因素来齿轮只.
数据类型:双
传动效率转矩断点Trq_trans_bpts-传动效率扭矩断点
[25 50 75 100 150 200 250](默认)|向量
传动效率转矩断点,单位N·m。
依赖关系
若要启用此参数,请设置传输效率的因素来齿轮,输入扭矩,输入速度和温度.
数据类型:双
传输效率速度断点,omega_trans_bpts-传输效率和速度断点
[500.383141080919 749.619781962827 1002.676141478941 1250.957852702297 1499.239563925654 1747.521275149011 1995.802986372368 2501.915705404595 2998.479127851308 4001.155269330249 5003.83141080919](默认)|向量
传输效率速度断点,单位为rad/s。
依赖关系
若要启用此参数,请设置传输效率的因素来齿轮,输入扭矩,输入速度和温度.
数据类型:双
传输效率温度断点,Temp_trans_bpts—传输效率温度断点
(313 358)(默认)|向量
传输效率温度断点,单位为K。
依赖关系
若要启用此参数,请设置传输效率的因素来齿轮,输入扭矩,输入速度和温度.
数据类型:双
传输效率矢量eta_trans_tbl-传输效率矢量
数组
传输效率向量。没有尺寸。
依赖关系
若要启用此参数,请设置传输效率的因素来齿轮,输入扭矩,输入速度和温度.
数据类型:双
速度断点,f_tbrake_n_bpt——速度断点
[0 750 1053.57142857143 1357.14285714286 1660.71428571429 1964.28571428571 2267.85714285714 2571.42857142857 2875 3178.57142857143 3482.14285714286 3785.71428571429 4089.28571428571 4392.85714285714 4696.42857142857 5000](默认)|向量
速度断点,单位为rpm。
数据类型:双
命令转矩断点,f_tbrake_t_bpt-命令扭矩断点
[0 15 26.4285714285714 37.8571428571429 49.2857142857143 60.7142857142857 72.1428571428571 83.5714285714286 95 106.428571428571 117.857142857143 129.285714285714 140.714285714286 152.142857142857 163.571428571429 175](默认)|向量
命令转矩断点,单位N·m。
数据类型:双
制动力矩图,f_tbrake-制动力矩图
数组
制动力矩图,单位为N·m。
数据类型:双
发动机最小转矩命令表f_tbrake_min-最小发动机扭矩命令表
向量
最小发动机扭矩命令表,单位为N·m。
数据类型:双
燃料流图,f_fuel-燃料流量图
数组
燃料流量图,单位为千克/秒。
数据类型:双
最小发动机扭矩命令,HEVEngTrq_min-最小发动机扭矩命令
16.18610438796213(默认)|标量
最小发动机扭矩指令,单位N·m。
数据类型:双
燃油较低的热值,LHV-燃料较低的热值
46000000(默认)|标量
燃油较低的热值,单位为J/kg。
数据类型:双
发动机怠速,N_idle-发动机怠速
750(默认)|标量
发动机怠速,单位为rpm。
数据类型:双
电池充电状态断点,SOC_bpt-电池充电状态断点
[0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1](默认)|向量
电池电荷状态断点。没有尺寸。
数据类型:双
电池充电限制表,ChrgLmt-电池充电限制表
[1 1 1 1 1 1 1 0.9 0.7 0.5 0](默认)|向量
电池充电限制表。没有尺寸。
数据类型:双
电池放电限制表,DischrgLmt-电池放电限制表
[0 0.5 0.7 0.9 1 1 1 1 1 1 1](默认)|向量
电池放电限制表。没有尺寸。
数据类型:双
最大电池电流,BattCurrMax-最大电池电流
150(默认)|标量
最大电池电流,A。
数据类型:双
DC/DC变换器效率,eta_dcdc—DC/DC变换器效率
1(默认)|标量
直流/直流转换器的效率。没有尺寸。
数据类型:双
电池最大充电功率,BattChrgPwrMax—最大充电功率
-30000年(默认)|标量
最大电池充电功率,单位W。
数据类型:双
电池最大放电功率,BattDischrgPwrMax—电池最大放电功率
46000(默认)|标量
电池最大放电功率,单位为W。
数据类型:双
电机最大转矩表,f_tmtr_max-电机最大转矩表
向量
电机最大转矩表,单位N·m。
数据类型:双
电机速度断点,f_mtr_w_bpt-电机速度断点
向量
电机转速断点,单位为rpm。
数据类型:双
电机转矩断点,f_mtr_t_bpt-电机转矩断点
向量
电机转矩断点,单位N·m。
数据类型:双
电机效率图,f_mtr_eta-电机效率图
数组
电动机效率的地图。没有尺寸。
数据类型:双
电机转矩计算点数,Ngrid-电机转矩计算点数
200(默认)|标量
电机转矩计算点数。没有尺寸。
数据类型:双
P0带比,N_P0- P0带比
3.(默认)|标量
P0带比率。没有尺寸。
依赖关系
若要启用此参数,请设置电机位置来P0.
数据类型:双
ECMS权重因子,ECMS_s- ECMS权重因子
3.385(默认)|标量
ecm权重因子。没有尺寸。
数据类型:双
惩罚因素功率,惩罚fctrpwr-惩罚因子功率
3.(默认)|标量
惩罚因子的力量。没有尺寸。
数据类型:双
自适应ECMS比例增益,ECMS_Kp-自适应ECMS比例增益
0(默认)|标量
自适应ECMS比例增益。没有尺寸。
依赖关系
若要启用此参数,请设置ecm方法来自适应.
数据类型:双
自适应ECMS积分增益,ECMS_Ki-自适应ECMS积分增益
0(默认)|标量
自适应ECMS积分增益。没有尺寸。
依赖关系
若要启用此参数,请设置ecm方法来自适应.
数据类型:双
约束惩罚因子,PenaltyFctr-约束惩罚因素
10000000(默认)|标量
约束惩罚因子。没有尺寸。
数据类型:双
目标电池充电状态,SOCTrgt-目标电池的充电状态
60(默认)|标量
目标电池电荷状态。没有尺寸。
数据类型:双
最低电池充电状态,SOCmin-最低电池充电状态
40(默认)|标量
最低电池电荷状态。没有尺寸。
数据类型:双
最大电池充电状态,SOCmax-电池最大充电状态
80(默认)|标量
最大电池电荷状态。没有尺寸。
数据类型:双
致谢
MathWorks®我要感谢Simona Onori博士对该区块实现的ECMS最优控制算法的贡献。Onori博士是斯坦福大学能源工程教授。她的研究兴趣包括汽车和电网级应用储能装置的电化学建模、估计和优化、混合动力和电动汽车建模和控制、PDE建模和排放缓解系统的模型阶数降低和估计。她是IEEE的资深成员®.





参考文献
A.巴拉兹,E.摩拉,S.皮辛格,城市汽车电动动力系统优化研究.SAE技术文件2011-01-2451。Warrendale, PA: SAE替代动力系统国际期刊,2012。
Onori, S. Serrao, L.和Rizzoni, G.,混合动力电动汽车能源管理系统.纽约:施普林格,2016。
扩展功能
版本历史
介绍了R2020b
另请参阅
您也可以从以下列表中选择网站: