基于模型的弱磁场校正PMSM最优转矩控制方法
作者:胡dakai, MathWorks
永磁同步电机校准是高性能电力牵引驱动控制系统设计中不可缺少的环节。传统上,校准过程涉及大量的硬件测功机(dyno)测试和数据处理,其准确性很大程度上取决于校准工程师的专业知识。
基于模型的校准标准化了PMSM校准过程,减少了不必要的测试,并产生一致的结果。它是一个经过行业验证的自动化工作流,使用统计建模和数值优化来优化复杂的非线性系统。它可以在广泛的应用中使用,并以被采用在内燃机控制校准而闻名。当应用于电机控制校准时,基于模型的校准工作流可以帮助电机控制工程师实现永磁同步电机的最佳转矩和弱磁场控制。
永磁同步电机的表征和校准:挑战和要求
永磁同步电机从其他类型的电机中脱颖而出,因为他们的高效率和扭矩密度。这是因为机器内部的永磁体可以在没有外部激励的情况下产生大量的气隙磁通。这一特殊特性使PMSM成为非牵引和牵引电机驱动应用的优秀候选人。
大多数非牵引式永磁同步电机应用只要求机器在恒转矩区域运行,在此区域其控制方案相对简单。牵引式永磁同步电机控制除了需要快速的动态响应外,还需要精确的转矩输出和宽的恒功率-转速范围运行。为了实现这些控制目标,特别是在电动或混合动力汽车,牵引永磁同步电机必须在场强减弱区域,需要在扭矩、速度和效率之间进行权衡。
设计高性能弱场控制算法的一个重要部分是校准弱场控制查找表。在生成表数据之前,永磁同步电机特性测试通常需要使用动态设置或通过ANSYS Maxwell或JSOL JMAG等FEA工具进行。
通过永磁同步电机特性测试,得到了不同电流和转速工作点下的磁链表和实测转矩。这里我们需要区分永磁同步电机描述从校准.永磁同步电机的表征涉及到对动态电机或使用FEA工具进行一系列测试,目的是提取重要的机器信息,如磁链和转矩。PMSM控制校准包括计算控制器查找表,在不同的操作点产生最大转矩或最佳效率。控制校准过程通常发生在永磁同步电机表征之后。这两个过程都是高性能永磁同步电机控制设计所必需的。
基于模型的校准工作流
当应用于PMSM控制校准时,基于模型的校准工作流程通常包括四个步骤(图1):
- 设计表征实验。
- 预处理PMSM特征数据集。
- 拟合PMSM特性模型。
- 优化PMSM控制器查找表数据。

图1。基于模型的永磁同步电机控制校准工作流程。
1.设计表征实验
物理动态上的全析因表征是浪费的,因为它增加了实验时间、成本和维护。在基于模型的校准中,提出了统计间隔的工作点作为测试点。无论实验是在物理动态环境中还是在有限元分析环境中进行,产生的电流id和iq测试点将作为控制命令给出,永磁同步电机的速度将由动态电机调节或在有限元分析工具中设置。使用虚拟动态需要一个详细的永磁同步电机有限元模型。然而,一旦创建了模型,就可以在一组更全面的操作点上对其进行测试,而不会产生额外的成本开销。
2.PMSM特性数据集的预处理
在PMSM表征过程中,转矩和dq轴磁链数据要么直接在动态上测量,要么从每个工作点的id、iq和速度的FEA工具中导出。描述完成后,数据集按扭矩轮廓和速度步长重新排列,每个变量(例如,扭矩)以单列格式存储,然后导入到基于模型的校准工具箱™(图2)。如果需要,可以执行额外的分析以去除外围数据。在物理测试中,由于噪声和测量误差,异常值是很常见的。

图2。操作点数据集导入到基于模型的校准工具箱。
3.拟合永磁同步电机特性模型
模型拟合是基于模型的校准工作流程的重要组成部分。(注意,本文中提到的模型不是电动机或控制器模型;他们是统计模型中,高斯过程回归或径向基函数等函数表示导入数据集中变量之间的关系。)具体来说,创建了两组模型:iq作为id和扭矩的函数,电压裕度作为id和扭矩的函数。每个模型都是在一组共同的电机速度下建模的。这些速度用作最终控制器查找表的断点。图3显示了按两个转速工作点分组的模型:1000 rpm和5000 rpm。

图3。不同速度工作点的Iq和电压裕度(delta_vs)模型示例。
iq和电压裕度模型根据速度工作点的不同而不同,因为速度可以直接影响运行边界。从有限数量的特征数据点中准确地表示操作边界是不可能的。被校准的PMSM的实际运行边界通常受到外部限制因素的影响,如驱动系统的热限制和逆变器的直流母线电压水平。
在基于模型的校正中,拟合模型的操作边界近似于包含数据集的凸包,如图3中彩色表面的边缘所示。这些边界对于校准工作流的第4步很重要,因为它们被用作优化问题的约束。
4.优化PMSM控制器查找表数据
在基于模型的校准中,运行优化例程和生成最终校准查找表的过程使用CAGE执行,CAGE是基于模型的校准工具箱中的校准生成工具。在CAGE中,第3步中的模型用于目标函数模型或作为约束。例如,使用电压裕度模型作为不同速度下的电压约束,以保证整体调制电压不超过直流母线电压所施加的最大电压。除了约束之外,基于这些拟合模型还可以建立单个或多个目标。
优化弱磁场控制的一个共同目标是在达到所需转矩的同时最大化PMSM的效率。这是通过设置每安培扭矩(TPA)作为目标来实现的,以最大化并同时执行电流和电压约束。结果是一个优化的操作区域,包括最大扭矩每安培(MTPA),最大扭矩每伏(MPTV),以及介于两者之间的操作点。
图4显示了如何通过CAGE过程获得查找表中的优化操作点。浅蓝色和黄色阴影区域表示在特定速度工作点对应的电流和电压约束,绿色区域是满足这两个约束的可行区域。图中的扭矩轮廓表示特定的扭矩要求。为了实现PMSM的最大效率控制,CAGE中的优化器沿着可行区域内的转矩轮廓搜索,以找到最大TPA目标点。因此,在图4所示的示例中,点a将被选为最优。图4中其他优化的查找表点是用CAGE中的相同例程计算的。

图4。约束条件下的TPA优化。
通过与并行计算工具箱™一起运行,您可以加速上面描述的优化例程。在启用了并行计算后,在一台典型的四核PC上,整个工作流程在10分钟内就可以聚合。
运行优化例程后,可以通过插值或裁剪等各种填充方法,将优化结果填充到最终的校准查找表中。理论上,您可以为查找表选择任何扭矩和速度断点,但扭矩断点的常用选择是最大扭矩的百分比。选择可实现的最大扭矩的扭矩百分比,而不是绝对扭矩值,可以确保整个查找表都可以填充有效的优化结果(图5)。
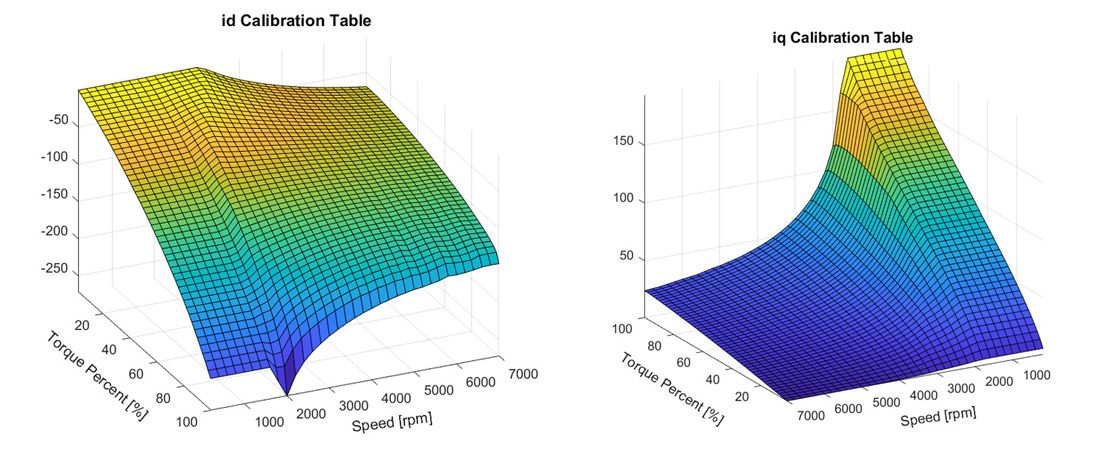
图5。优化的id和iq校准表与场弱化包括在内。
扩展的工作流
本文介绍了基于模型的基本校准工作流程,用于生成具有弱磁场的最优PMSM转矩控制查找表。本文中描述的示例基于弱电场控制表,其中输入扭矩命令、速度,可能还有直流总线电压。
对于使用转矩命令和最大磁链作为查找表输入的算法,工作流是相同的,只是函数模型略有不同。此外,如果您的应用程序需要更精确和更精细的校准,您可以考虑更多的变量,如逆变器电压降、磁芯损耗、交流电阻、风阻或摩擦,在模型拟合和CAGE过程中。
2020年出版的
2022世界杯八强谁会赢?产品使用
了解更多
您也可以从以下列表中选择网站: