从低保真度无人机模型到高保真度无人机模型的转变分三个阶段
不断改进您的无人机工厂模型,以与最新的可用信息保持同步。
背景
无人机(UAV)设计周期在设计过程中提供了对无人机特性更好的增量访问。通过增加它的保真度,这些信息可以被用来通过基于模型的设计方法不断地进化植物模型。

在设计周期接近尾声时,有足够的信息来开发一个高保真的工厂。为了精确建模无人机,一个 高保真 模型结合了建模所有的力和力矩,风和 环境 效应和传感器的细节。 然而,设计师在设计过程的早期可能无法获得这一级别的信息。为了建立这样一个 复杂的 模型,它可以进行多次飞行和风洞测试,以创建足够详细的空气动力系数,以计算所有影响无人机的力和力矩。这些因素 可能会潜在地阻碍制导算法的设计,直到设计过程结束,当获得更现实的无人机动态估计
为了更快地同时设计制导算法,无人机算法设计者 可以从一个低保真度模型开始,并在附加数据可用时发展他们的植物模型
仅使用低保真度模型设计 制导算法 也会带来风险。在没有控制器或空气动力学约束的情况下, 乐观制导技术可能会对飞机动力学较慢的真正无人机失败。
这个例子强调了另一种方法。你从低保真度的 引导块 到一个中,然后 高保真度的 模型,逐步添加控制层和动态到模拟。在这个过程中,中保真模型成为利用植物模型的有限信息来优化和测试引导算法的有用工具。
因此,中保真模型被用来测试遵循算法的给定路径。因为高保真模型在设计过程结束之前是不可用的,所以 高保真模型只在以后通过比较步骤响应和遵循 . 行为的路径来验证我们的建模方法
打开示例和项目文件
单击,访问示例文件打开生活的脚本或使用openExample函数。
openExample (“shared_uav_aeroblks / UAVFidelityExample”)
打开本例中提供的Simulink™项目。
cdfidelityExampleopenProject (“fidelityExample.prj”)
该项目包含一个无人机模型的三个版本,低保真度,中保真度和高保真度的步骤,以研究它们的步进响应和路径跟随行为。
低保真模型
假设您的无人机具有下表所示的以下设计规范。该模型中提供的低保真度变体经过调优,以实现所需的响应,但是您可以根据特定的需求调优这些增益。低保真度装置采用无人机导引块,这是一种无人机的降阶模型。若要运行低保真度变体,请单击模拟植物 快捷方式下低忠诚项目工具条的 组。

该快捷方式将FidelityStage参数设置为1,配置FidelityStepResponse模型以模拟低保真度模型,并输出步长响应。阶跃响应是根据高度、空速和滚转响应计算的。

打开无人机固定翼制导模型块FidelityStepResponse / FixedWingModel / LowFidelity子系统。在配置 选项卡,检查增益设置为高度,空速和滚转响应。该制导块将控制器与飞机的动力学集成在一起。低保真改型给出了无人机实际反应速度的初步估计,以帮助调整高层规划者。
Medium-Fidelity模型
随着无人机设计的进展,升力和阻力系数变得可用。飞机的发动机由用户选择,它定义了推力曲线。为了测试针对这些新信息的引导算法的有效性,该示例在此步骤中将该信息添加到植物模型中。
为了设计一个中保真模型,模型只需要初步 气动系数,推力曲线,和响应时间规范.要建模一个中等保真度的无人机,你可以使用固定翼点质量块。块只需要升力、阻力和推力输入,这些在早期设计阶段比飞机的详细力和力矩更容易近似。若要设置中保真度变体,请单击建立工厂 快捷方式下媒介忠诚项目工具条的 组。
检查下的模型中的Vehicle Dynamics选项卡FidelityStepResponse/固定翼模型/中fidelity /无人机工厂动力学/车辆动力学.

中保真度模型将无人机表示为一个点质量,主要控制变量为迎角和滚转。这种中等保真度的装置模型将横摇、俯仰和推力作为控制输入。点质量块假定瞬时动态的滚转和迎角。该模型使用一个传递函数,根据上一步中共享的表中的滚动响应规范对滚动延迟进行建模。
这种中保真度的飞机控制的是俯仰,而不是迎角。由于迎角是点质量块的输入,植物模型使用下面的方程将节距转换为阿尔法。
+
, 而且 分别表示俯仰,在风框中的飞行路径角和迎角。
与低保真度模型不同,中保真度模型将自动驾驶仪从植物动态中分离出来。中保真度装置需要一个外环控制器,用于增加高度-俯仰和空速-油门控制。所提供的预定义控制器使用标准的pid调优循环,以达到满意的响应没有超调。若要检查外环控制器,请打开Outer_Loop_Autopilot 仿真软件模型。
Medium-Fidelity阶跃响应
在前面的步骤中,通过假设无人机满足所有响应时间规范,对低保真度工厂进行了调优。为了验证这个假设,使用中保真度的植物。改进后的植物的阶跃响应的研究被用来对比低保真度和中保真度变体的性能。要模拟中保真阶跃响应,请单击 模拟植物 快捷方式媒介忠诚项目工具条的 组。阶跃响应图如图所示。
请注意,该模型满足下表所示的设计标准,达到了0.6秒的风速沉降时间和4.1秒的高度响应。然而,高度响应比低保真度变体慢。这种滞后的反应是由于附加的空气动力学约束放在中保真度的工厂。

模拟路径跟踪算法
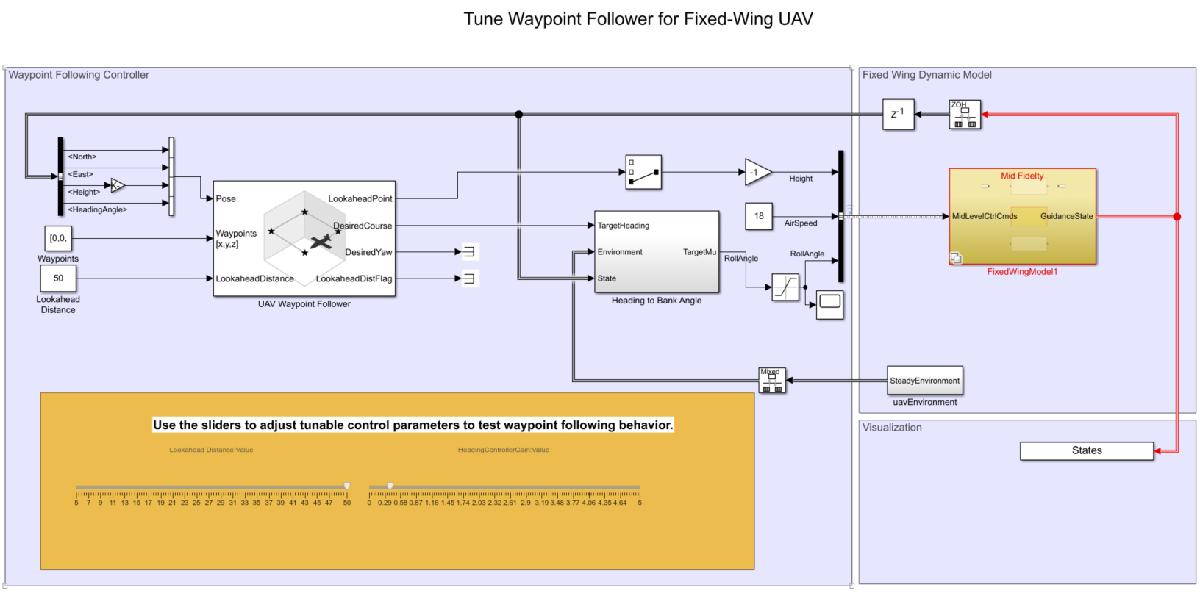
随着无人机中保真模型的更精确响应,你现在可以测试航路点跟随器或制导算法来跟随航路点。制导算法设计参见“固定翼无人机调谐航路点跟随器”示例。
要模拟和可视化中保真无人机路径遵循的模型,单击 模拟路径追随者 快捷方式媒介忠诚项目工具条的 组。
请注意,中保真无人机精确地遵循所需的路径。

高阶跃响应
中保真度模型用于使用早期设计状态下可用的简单飞机参数测试路径跟随设计。然而,为了研究更复杂的情况,继续增加捕捉无人机控制响应的保真度是很重要的。例如,使用更详细的空气动力学系数可以分析复杂的运动,如双重机动。另一个例子是,添加执行器动力学可以让你研究姿态对内回路控制器的后续影响,这可能导致不稳定。通过这种方式,高保真工厂允许改进控制系统设计。在这一步中,为了研究反应的变化,我们观察了具有这些附加动态的高保真植物。
高保真装置将所有的力和力矩输入到一个6自由度的块,增加机载传感器,并为无人机建模作动器动力学。与中保真度植物不同,高保真度版本不直接接受姿态输入。相反,添加一个内循环控制器来控制姿态。此外,偏航补偿环平衡 非零 侧滑。该模型重用了为中保真模型设计的外环控制器。要验证中保真模型提供了有用的中间信息,请使用高保真模型的响应。
若要模拟和可视化高保真阶跃响应,请单击模拟植物 快捷方式下高保真项目工具条的 组。注意,尽管增加了复杂性,但轨迹与中保真模型匹配得很好。另外,请注意,高保真级的设计规范是相对相同的。这种相似性表明,中保真度工厂对无人机动力学建模是准确的。

模拟高保真路径跟踪算法
在设计周期结束时,高保真模型终于可用了。为了获得最终的无人机路径跟随特性,你现在可以在高保真装置上测试在前面步骤中开发的制导算法。单击模拟路径追随者 快捷方式下高保真项目工具条的 组。

注意,使用制导和外环控制参数,该模型得到了与中保真模型相似的响应。这验证了高保真植物的制导算法。
结论
中保真度模型精确预测无人机动态,在设计过程中优化利用有限的可用信息。该示例设计了外环控制器并测试了一个路径点跟随器,而不需要高保真植物模型中的所有信息。
为了模拟其他动态,如驱动器滞后,中保真度装置是灵活的,可以随着设计不断发展。算例在无风条件下得到了结果。在存在风干扰的情况下,控制器和路径跟随器的跟踪性能可能会受到不利影响。为了增强自动驾驶仪控制器来补偿风的影响,在高保真植物模型中利用大气风模型。
另请参阅
块
相关的话题
您也可以从以下列表中选择网站: