雷达设计师gydF4y2Ba
模拟雷达增益和损耗,并评估在不同环境下的性能gydF4y2Ba
描述gydF4y2Ba
的gydF4y2Ba雷达设计师gydF4y2BaApp是一个交互式工具,在雷达开发的早期阶段,帮助工程师和系统分析师进行雷达系统的高级设计和评估。使用这款应用,你可以:gydF4y2Ba
在一次会议中评估和比较多个雷达设计gydF4y2Ba
添加智能雷达、环境和目标gydF4y2Ba雷达设计配置gydF4y2Ba来启动你的分析gydF4y2Ba
将由于地球曲率、大气、地形和降水造成的环境影响纳入其中gydF4y2Ba
添加自定义目标雷达横截面,天线/阵列模型,以及距离无关和距离相关的损失gydF4y2Ba
导出并保存结果、会话、模型和图,以继续您的分析gydF4y2Ba

打开雷达设计器AppgydF4y2Ba
MATLABgydF4y2Ba®gydF4y2Ba将来发布:gydF4y2Ba应用程序gydF4y2Ba选项卡,在gydF4y2Ba信号处理与通信gydF4y2Ba,单击应用程序图标。gydF4y2Ba
MATLAB命令提示符:输入gydF4y2Ba
radarDesignergydF4y2Ba.gydF4y2Ba
例子gydF4y2Ba
设计汽车雷达gydF4y2Ba
设计一个安装在卡车顶部的雷达。调整设计参数,使雷达可以在多雾条件下工作,仍然使目标范围。将设计会话导出到MATLAB工作区。gydF4y2Ba
开放gydF4y2Ba雷达设计师gydF4y2Ba.在命令行中,键入gydF4y2Ba
radarDesignergydF4y2Ba
汽车雷达gydF4y2Ba选择。该应用程序指定了典型的雷达设计、目标和环境参数。gydF4y2Ba

你设计的雷达必须安装在离地3米的地方。在gydF4y2Ba雷达gydF4y2Ba选项卡,gydF4y2Ba天线和扫描gydF4y2Ba部分,改变gydF4y2Ba天线高度gydF4y2Ba从1米到3米。gydF4y2Ba
在gydF4y2Ba环境gydF4y2Ba选项卡,gydF4y2Ba降水gydF4y2Ba节中,指定gydF4y2Ba降水类型gydF4y2Ba作为gydF4y2Ba雾gydF4y2Ba并设置gydF4y2Ba雾密度gydF4y2Ba来gydF4y2Ba重gydF4y2Ba.gydF4y2Ba
随着gydF4y2Ba信噪比与范围gydF4y2Ba情节和gydF4y2Ba指标和要求gydF4y2Ba表显示,雷达满足阈值最大射程,但达不到300米的期望最大射程。gydF4y2Ba

增加发射功率以获得更高的最大射程。在gydF4y2Ba雷达gydF4y2Ba选项卡,gydF4y2Ba主要gydF4y2Ba部分,增加gydF4y2Ba峰值功率gydF4y2Ba来gydF4y2Ba4 e-05gydF4y2Ba千瓦gydF4y2Ba.从图和表中可以看出,新功率值的雷达满足了要求。gydF4y2Ba

导出雷达设计到MATLAB工作区。在工具条上,单击gydF4y2Ba出口gydF4y2Ba并选择gydF4y2Ba生成指标报告gydF4y2Ba生成数字度量的格式化报告。gydF4y2Ba
相关的例子gydF4y2Ba
参数gydF4y2Ba
雷达,目标和环境gydF4y2Ba雷达gydF4y2Ba——设计参数gydF4y2Ba
选项卡gydF4y2Ba
要启用gydF4y2Ba雷达gydF4y2Ba参数,点击gydF4y2Ba新会话gydF4y2Ba在应用程序工具条上加载一个内置的gydF4y2Ba雷达设计配置gydF4y2Ba.使用gydF4y2Ba雷达gydF4y2Ba部分,用于在会话期间添加、复制或删除雷达设计。gydF4y2Ba
使用gydF4y2Ba当前雷达gydF4y2Ba列表在单一会话中切换不同的雷达设计。gydF4y2Ba
使用gydF4y2Ba的名字gydF4y2Ba选项框以更改当前选定雷达的名称。gydF4y2Ba
主要gydF4y2Ba—脉冲和载波设置gydF4y2Ba
标签部分gydF4y2Ba
使用这些参数可以指定脉冲和载波设置,例如载波频率和发射功率。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
载波gydF4y2Ba频率gydF4y2Ba(默认)或gydF4y2Ba波长gydF4y2Ba |
载频或载频波长,指定为标量。gydF4y2Ba
|
| 脉冲的带宽gydF4y2Ba | 中指定为标量的传输脉冲的带宽gydF4y2Ba赫兹gydF4y2Ba,gydF4y2Ba千赫gydF4y2Ba,gydF4y2Ba兆赫gydF4y2Ba,或gydF4y2BaGHzgydF4y2Ba.gydF4y2Ba |
平均功率gydF4y2Ba(默认)或gydF4y2Ba峰值功率gydF4y2Ba |
平均发射功率或峰值发射功率,用标量表示。gydF4y2Ba
|
脉冲宽度gydF4y2Ba(默认)或gydF4y2Ba工作周期gydF4y2Ba |
雷达脉冲宽度或雷达占空比,指定为一个标量。gydF4y2Ba
|
脉冲重复频率gydF4y2Ba(默认)或gydF4y2Ba革命制度党gydF4y2Ba |
脉冲重复频率(PRF)或脉冲重复间隔(PRI),指定为标量。gydF4y2Ba
|
硬件gydF4y2Ba——声音设置gydF4y2Ba
选项卡分段gydF4y2Ba
使用这些参数来指定噪声设置,例如噪声温度或动态范围。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
噪声温度gydF4y2Ba或gydF4y2Ba噪声图gydF4y2Ba |
系统噪声温度或噪声数值,指定为标量。gydF4y2Ba
|
| 参考噪声温度gydF4y2Ba | 参考噪声温度,用标量K表示。gydF4y2Ba |
| 量化噪声gydF4y2Ba | 选择gydF4y2Ba量化噪声gydF4y2Ba包括量化噪声。gydF4y2Ba |
| 的比特数gydF4y2Ba | 模数转换器(A/D)中的位数,指定为无量纲标量。gydF4y2Ba 该参数仅适用于gydF4y2Ba量化噪声gydF4y2Ba被选中。gydF4y2Ba |
| 动态范围gydF4y2Ba | A/D转换器的动态范围,在gydF4y2Ba 该参数仅适用于gydF4y2Ba量化噪声gydF4y2Ba被选中。gydF4y2Ba |
天线和扫描gydF4y2Ba-位置、波束宽度和增益设置gydF4y2Ba
标签部分gydF4y2Ba
使用这些参数可以指定位置、波束宽度和增益设置,如天线高度、天线极化或方位角波束宽度。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 天线高度gydF4y2Ba | 天线在表面上的高度,用标量表示gydF4y2Ba 该参数同时适用于发射天线和接收天线。gydF4y2Ba |
| 天线倾角gydF4y2Ba | 天线的电轴与接地面之间的角度,用in中的标量表示gydF4y2Ba 该参数同时适用于发射天线和接收天线。gydF4y2Ba |
| 天线极化gydF4y2Ba | 指定天线极化为gydF4y2Ba 该参数同时适用于发射天线和接收天线。gydF4y2Ba |
发射天线增益输入gydF4y2Ba-发射天线增益gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba发射天线增益输入gydF4y2Ba作为其中之一:gydF4y2Ba
手册gydF4y2Ba——使用gydF4y2Ba获得gydF4y2Ba输入发射天线的自定义值。gydF4y2Ba从波束宽度gydF4y2Ba-假设无旁瓣的理想高斯波束图,从波束宽度计算发射天线增益。您可以设置这些参数。gydF4y2Ba参数gydF4y2Ba 描述gydF4y2Ba 方位波束宽度gydF4y2Ba 发射天线的方位角波束宽度,指定为中的标量gydF4y2Ba 度gydF4y2Ba,gydF4y2BaradgydF4y2Ba,或gydF4y2BamradgydF4y2Ba.gydF4y2Ba海拔波束宽度gydF4y2Ba 发射天线的仰角波束宽度,在中指定为标量gydF4y2Ba 度gydF4y2Ba,gydF4y2BaradgydF4y2Ba,或gydF4y2BamradgydF4y2Ba.gydF4y2Ba雷达设计师gydF4y2Ba计算并显示接收天线增益,单位为dBi。gydF4y2Ba
接收天线增益输入gydF4y2Ba-接收天线增益,如果不同于发射天线gydF4y2Ba
选项卡分段gydF4y2Ba
选择gydF4y2Ba使用不同的天线接收gydF4y2Ba表示接收和发射天线有不同的增益。如果使用不同的天线进行接收,则可以指定gydF4y2Ba接收天线增益输入gydF4y2Ba作为其中之一:gydF4y2Ba
手册gydF4y2Ba——使用gydF4y2Ba获得gydF4y2Ba输入接收天线的自定义值,单位为dBi。gydF4y2Ba从波束宽度gydF4y2Ba-假设无旁瓣的理想高斯波束图,从波束宽度计算接收天线增益。您可以设置这些参数。gydF4y2Ba参数gydF4y2Ba 描述gydF4y2Ba 方位波束宽度gydF4y2Ba 接收天线的方位角波束宽度,指定为中的标量gydF4y2Ba 度gydF4y2Ba,gydF4y2BaradgydF4y2Ba,或gydF4y2BamradgydF4y2Ba.gydF4y2Ba海拔波束宽度gydF4y2Ba 接收天线的仰角波束宽度,指定为中的标量gydF4y2Ba 度gydF4y2Ba,gydF4y2BaradgydF4y2Ba,或gydF4y2BamradgydF4y2Ba.gydF4y2Ba雷达设计师gydF4y2Ba计算并显示接收天线增益,单位为dBi。gydF4y2Ba
扫描模式gydF4y2Ba-扫描模式设置gydF4y2Ba
选项卡分段gydF4y2Ba
指定您的设计的扫描模式为以下之一:gydF4y2Ba
没有一个gydF4y2Ba—雷达不扫描。gydF4y2Ba雷达设计师gydF4y2Ba不将扫描相关的损失纳入分析。gydF4y2Ba机械gydF4y2Ba-雷达执行机械扫描。gydF4y2Ba雷达设计师gydF4y2Ba将波束形状损失和波束驻留因子(用于快速扫描波束的距离相关损失)纳入分析。gydF4y2Ba电子gydF4y2Ba-雷达采用相控阵进行电子扫描。gydF4y2Ba雷达设计师gydF4y2Ba将光束形状损失和扫描扇形损失纳入分析。gydF4y2Ba
如果您指定gydF4y2Ba扫描模式gydF4y2Ba作为gydF4y2Ba机械gydF4y2Ba或gydF4y2Ba电子gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 方位扫描扇区大小gydF4y2Ba | 中指定为标量的搜索卷的方位角跨度gydF4y2Ba度gydF4y2Ba,gydF4y2BaradgydF4y2Ba,或gydF4y2BamradgydF4y2Ba.gydF4y2Ba |
| 仰角扫描范围gydF4y2Ba | 中的两个标量指定的扫描卷的初始和最终高程gydF4y2Ba度gydF4y2Ba,gydF4y2BaradgydF4y2Ba,或gydF4y2BamradgydF4y2Ba.gydF4y2Ba |
根据所选参数,gydF4y2Ba雷达设计师gydF4y2Ba计算并显示这些设置:gydF4y2Ba
马克斯扫描速率gydF4y2Ba,在给定所选PRF、发射脉冲数和天线波束宽度的情况下,以度/秒为单位的最大扫描速率。此设置显示在gydF4y2Ba扫描模式gydF4y2Ba被指定为gydF4y2Ba
机械gydF4y2Ba.gydF4y2Ba搜索量大小gydF4y2Ba,立体角搜索体积的大小,以立体为单位。gydF4y2Ba
搜索时间gydF4y2Ba,即给定所选PRF、发射脉冲数和天线波束宽度时扫描搜索量所需的时间,以秒为单位。gydF4y2Ba
检测和跟踪gydF4y2Ba- - - - - -gydF4y2BaPgydF4y2Ba足总gydF4y2Ba消费者价格指数,gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Ba设置gydF4y2Ba
标签部分gydF4y2Ba
使用这些参数进行指定gydF4y2BaPgydF4y2Ba足总gydF4y2Ba消费者价格指数,gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Ba设置,如误报概率或跟踪确认逻辑阈值。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 误报概率gydF4y2Ba | 期望误报概率(gydF4y2BaPgydF4y2Ba足总gydF4y2Ba)在检测器的输出处,指定为无量纲标量。缺省值为10gydF4y2Ba6gydF4y2Ba(gydF4y2Ba |
| 的脉冲数gydF4y2Ba | 相干处理间隔(CPI)内的脉冲数,指定为正整数标量。gydF4y2Ba |
| 脉冲集成gydF4y2Ba | 脉冲积分,指定为gydF4y2Ba |
移动目标指示器(MTI)gydF4y2Ba-动目标指示器gydF4y2Ba
选项卡分段gydF4y2Ba
选择gydF4y2Ba移动目标指示器(MTI)gydF4y2Ba在设计中包含移动目标指示器处理。当您启用运动目标指标处理时,可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 消除器gydF4y2Ba | Canceler,指定为下列之一:gydF4y2Ba
|
| 零速度gydF4y2Ba | 杂波速度调整到MTI滤波器,指定为在gydF4y2Ba米/秒gydF4y2Ba,gydF4y2Ba公里/小时gydF4y2Ba,gydF4y2Bami /人力资源gydF4y2Ba,或gydF4y2Ba节gydF4y2Ba.gydF4y2Ba |
| 方法gydF4y2Ba | 方法执行MTI处理,指定为以下之一:gydF4y2Ba
|
| 正交处理gydF4y2Ba | 选择gydF4y2Ba正交处理gydF4y2Ba为您的设计启用正交通道(矢量)MTI处理。如果不勾选该参数,gydF4y2Ba雷达设计师gydF4y2Ba执行单通道MTI处理。gydF4y2Ba |
此选项在以下情况下可用gydF4y2Ba脉冲集成gydF4y2Ba被设置为gydF4y2Ba非相干gydF4y2Ba.gydF4y2Ba
二进制脉冲集成gydF4y2Ba-二进制脉冲积分gydF4y2Ba
选项卡分段gydF4y2Ba
指定如何执行二进制(gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Ba)脉冲积分作为其中之一:gydF4y2Ba
没有一个gydF4y2Ba- - - - - -gydF4y2Ba雷达设计师gydF4y2Ba不应用二进制积分。gydF4y2Ba自动gydF4y2Ba- - - - - -gydF4y2Ba雷达设计师gydF4y2Ba应用二进制积分并计算被检测脉冲的最佳数量(gydF4y2Ba米gydF4y2Ba)从总脉冲数(gydF4y2BaNgydF4y2Ba).gydF4y2Ba自定义gydF4y2Ba- - - - - -gydF4y2Ba雷达设计师gydF4y2Ba使用手动指定数量的检测到的脉冲应用二进制积分。如果选择此选项,请指定gydF4y2Ba探测到的脉冲数gydF4y2Ba(gydF4y2Ba米gydF4y2Ba)从总脉冲数(gydF4y2BaNgydF4y2Ba)作为正整数。gydF4y2Ba
此选项在以下情况下可用gydF4y2Ba脉冲集成gydF4y2Ba被设置为gydF4y2Ba非相干gydF4y2Ba.gydF4y2Ba
恒虚警率(CFAR)gydF4y2Ba-包括恒定的虚警率检测gydF4y2Ba
选项卡分段gydF4y2Ba
选择gydF4y2Ba恒虚警率(CFAR)gydF4y2Ba启用恒虚警率(CFAR)检测。当启用CFAR检测时,可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 参考单元数gydF4y2Ba | CFAR引用(训练)单元格的总数,指定为正整数标量。gydF4y2Ba |
| 方法gydF4y2Ba | CFAR检测方法,指定为以下之一:gydF4y2Ba
|
数量的cpi (gydF4y2Ba-相干处理间隔数gydF4y2Ba
选项卡分段gydF4y2Ba
将相干处理间隔(cpi)的数量指定为正整数标量。gydF4y2Ba
M-of-N CPI集成gydF4y2Ba——允许gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Bacpi的集成gydF4y2Ba
选项卡分段gydF4y2Ba
选择gydF4y2BaM-of-N CPI集成gydF4y2Ba要启用gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Ba相干处理区间(cpi)的积分。如果你使gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Ba综合cpi时,可设置该参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 具有检测功能的cpi个数gydF4y2Ba | 声明检测的相干处理间隔数(gydF4y2Ba米gydF4y2Ba)占cpi总数(gydF4y2BaNgydF4y2Ba),指定为无量纲标量。gydF4y2Ba |
灵敏度时间控制(STC)gydF4y2Ba-灵敏度时间控制gydF4y2Ba
选项卡分段gydF4y2Ba
选择gydF4y2Ba灵敏度时间控制gydF4y2Ba在设计中启用灵敏度时间控制。如果启用灵敏度时间控制,可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 截止频率gydF4y2Ba | 中指定为标量的使用全接收机增益的截止范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.默认值:50公里。gydF4y2Ba |
| 指数gydF4y2Ba | 选择指数以维持在截止范围内的目标可检测性。默认值:3.5。gydF4y2Ba |
跟踪确认逻辑gydF4y2Ba-跟踪确认概率gydF4y2Ba
选项卡分段gydF4y2Ba
使用gydF4y2Ba通用门历史算法gydF4y2Ba计算航迹确认概率。您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 确认阈值gydF4y2Ba | 确认阈值,指定为两个正整数标量,表示gydF4y2Ba米gydF4y2Ba- - - - - - -gydF4y2BaNgydF4y2Ba或gydF4y2Ba米gydF4y2Ba/gydF4y2BaNgydF4y2Ba确认逻辑。默认值:2/3。gydF4y2Ba |
更新的速度gydF4y2Ba或gydF4y2Ba更新时间gydF4y2Ba |
更新速率或更新时间:gydF4y2Ba
默认值:1hz或1s。gydF4y2Ba |
损失的因素gydF4y2Ba——损失因素gydF4y2Ba
标签部分gydF4y2Ba
使用这些参数指定损耗因素。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 黯然失色gydF4y2Ba | 蚀损,指定为gydF4y2Ba没有一个gydF4y2Ba(默认),gydF4y2BaRange-Dependent因素gydF4y2Ba,或gydF4y2Ba统计损失gydF4y2Ba.gydF4y2Ba |
| 定制的损失gydF4y2Ba | 自定义损失,指定为中的标量gydF4y2BadBgydF4y2Ba或gydF4y2Ba线性gydF4y2Ba单位。默认值:4 dB。gydF4y2Ba |
目标gydF4y2Ba——目标特征gydF4y2Ba
选项卡gydF4y2Ba
要启用gydF4y2Ba目标gydF4y2Ba参数,在应用中至少添加一个雷达。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 雷达横截面gydF4y2Ba | 雷达横截面,用标量表示gydF4y2Ba米gydF4y2Ba2gydF4y2Ba或gydF4y2BadBsmgydF4y2Ba.gydF4y2Ba |
| Swerling模型gydF4y2Ba | 转弯模型,指定为gydF4y2BaSwerling 0/5gydF4y2Ba,gydF4y2BaSwerling 1gydF4y2Ba,gydF4y2BaSwerling 2gydF4y2Ba,gydF4y2BaSwerling 3gydF4y2Ba,或gydF4y2BaSwerling 4gydF4y2Ba.gydF4y2Ba |
高度gydF4y2Ba或gydF4y2Ba仰角gydF4y2Ba |
高度或仰角,指定为标量。gydF4y2Ba
|
| 最大加速度gydF4y2Ba | 中的标量指定的最大加速度gydF4y2Ba米gydF4y2Ba2gydF4y2Ba或者单位为gydF4y2BaggydF4y2Ba.gydF4y2Ba |
环境gydF4y2Ba-景观及降水gydF4y2Ba
选项卡gydF4y2Ba
使用gydF4y2Ba环境gydF4y2BaTAB来合并由于地球曲率、大气、地形和降水造成的影响。gydF4y2Ba
大气和地表gydF4y2Ba-大气和表面特征gydF4y2Ba
标签部分gydF4y2Ba
指定大气和地表特征以使用季节性纬度模型、地表和地表杂波设置。gydF4y2Ba
默认情况下。gydF4y2Ba雷达设计师gydF4y2Ba有gydF4y2Ba自由空间gydF4y2Ba参数选择。此选项对应于真空传播,您可以控制的惟一变量是gydF4y2Ba降水gydF4y2Ba.若要访问其他选项,请清除此框。gydF4y2Ba
地球模型gydF4y2Ba——地球模型gydF4y2Ba
标签部分gydF4y2Ba
指定gydF4y2Ba地球模型gydF4y2Ba作为gydF4y2Ba弯曲的gydF4y2Ba或gydF4y2Ba平gydF4y2Ba.使用弯曲的地球模型可以访问更多的大气模型,并使您能够控制gydF4y2Ba有效地球半径gydF4y2Ba.gydF4y2Ba
大气模型gydF4y2Ba-大气类型gydF4y2Ba
标签部分gydF4y2Ba
指定雷达信号传播的大气类型gydF4y2Ba没有气氛gydF4y2Ba,gydF4y2Ba统一的gydF4y2Ba,gydF4y2Ba标准gydF4y2Ba,gydF4y2Ba较低的纬度gydF4y2Ba,gydF4y2Ba中期纬度gydF4y2Ba,或gydF4y2Ba高纬度gydF4y2Ba.gydF4y2Ba
没有气氛gydF4y2Ba——没有气氛gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba没有气氛gydF4y2Ba用常数折射率为1。该模型不考虑大气气体损失或透镜效果损失。gydF4y2Ba
统一的gydF4y2Ba——统一的气氛gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba统一的gydF4y2Ba对于具有均匀温度、压力和水蒸气密度的大气。该模型可以考虑大气气体损失,但不考虑透镜效应损失。您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 环境温度gydF4y2Ba | 均匀大气的温度,用标量表示gydF4y2BaCgydF4y2Ba或gydF4y2BaKgydF4y2Ba.默认值:15°C。gydF4y2Ba |
| 干燥的空气压力gydF4y2Ba | 均匀大气中的干燥空气压力,用标量表示gydF4y2Ba下丘脑-垂体-肾上腺轴的gydF4y2Ba,gydF4y2Ba巴勒斯坦权力机构gydF4y2Ba,或gydF4y2BambargydF4y2Ba.默认值:1013 hPa。gydF4y2Ba |
| 水蒸气密度gydF4y2Ba | 均匀大气中的水蒸气密度,用标量表示gydF4y2Bag / mgydF4y2Ba3.gydF4y2Ba或gydF4y2Ba克/厘米gydF4y2Ba3.gydF4y2Ba.默认值:7.5 g / mgydF4y2Ba3.gydF4y2Ba.gydF4y2Ba |
| 包括大气气体损失gydF4y2Ba | 选择包含大气气体吸收引起的路径损失。gydF4y2Ba |
标准gydF4y2Ba-国际电联平均年度全球参考大气gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba标准gydF4y2Ba使用ITU- r P.835-6中推荐的国际电联平均年度全球参考大气(MAGRA)gydF4y2Ba[1]gydF4y2Ba.此选项仅适用于以下情况gydF4y2Ba地球模型gydF4y2Ba被指定为gydF4y2Ba弯曲的gydF4y2Ba.您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 水汽密度剖面gydF4y2Ba | 水汽密度剖面,指定为gydF4y2Ba自动gydF4y2Ba或gydF4y2Ba自定义gydF4y2Ba.使用此参数可使用ITU-R P.835-6中推荐的设置,或使用您自己的水汽密度和刻度高度设置。gydF4y2Ba |
| 地表水汽密度gydF4y2Ba | 表面水蒸气密度,用标量表示gydF4y2Ba 该参数仅适用于gydF4y2Ba水汽密度剖面gydF4y2Ba被指定为gydF4y2Ba |
| 规模高度gydF4y2Ba | 中的标量指定的刻度高度gydF4y2Ba 该参数仅适用于gydF4y2Ba水汽密度剖面gydF4y2Ba被指定为gydF4y2Ba |
| 包括大气气体损失gydF4y2Ba | 选择包含大气气体吸收引起的路径损失。gydF4y2Ba |
| 包括镜头效果损失gydF4y2Ba | 选择包含由于大气中折射率变化而导致的镜头效果损失。这种效应仅在小的掠射角下显著。gydF4y2Ba |
较低的纬度gydF4y2Ba-国际电联纬度低于22度的大气模式gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba较低的纬度gydF4y2Ba使用ITU- r P.835-6中推荐的低于22°纬度的国际电联大气模型gydF4y2Ba[1]gydF4y2Ba.此选项仅适用于以下情况gydF4y2Ba地球模型gydF4y2Ba被指定为gydF4y2Ba弯曲的gydF4y2Ba.您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 包括大气气体损失gydF4y2Ba | 选择包含大气气体吸收引起的路径损失。gydF4y2Ba |
| 包括镜头效果损失gydF4y2Ba | 选择包含由于大气中折射率变化而导致的镜头效果损失。这种效应仅在小的掠射角下显著。gydF4y2Ba |
中期纬度gydF4y2Ba-国际电联22度至45度纬度的大气模式gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba中期纬度gydF4y2Ba使用ITU- r P.835-6中推荐的22°至45°纬度的国际电联大气模型gydF4y2Ba[1]gydF4y2Ba.此选项仅适用于以下情况gydF4y2Ba地球模型gydF4y2Ba被指定为gydF4y2Ba弯曲的gydF4y2Ba.您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 季节gydF4y2Ba | 季节,指定为gydF4y2Ba夏天gydF4y2Ba或gydF4y2Ba冬天gydF4y2Ba.gydF4y2Ba |
| 包括大气气体损失gydF4y2Ba | 选择包含大气气体吸收引起的路径损失。gydF4y2Ba |
| 包括镜头效果损失gydF4y2Ba | 选择包含由于大气中折射率变化而导致的镜头效果损失。这种效应仅在小的掠射角下显著。gydF4y2Ba |
高纬度gydF4y2Ba-纬度大于45度的国际电联大气模式gydF4y2Ba
选项卡分段gydF4y2Ba
指定gydF4y2Ba高纬度gydF4y2Ba对于ITU- r P.835-6中推荐的高于45°的纬度使用国际电联大气模型gydF4y2Ba[1]gydF4y2Ba.此选项仅适用于以下情况gydF4y2Ba地球模型gydF4y2Ba被指定为gydF4y2Ba弯曲的gydF4y2Ba.您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 季节gydF4y2Ba | 季节,指定为gydF4y2Ba夏天gydF4y2Ba或gydF4y2Ba冬天gydF4y2Ba.gydF4y2Ba |
| 包括大气气体损失gydF4y2Ba | 选择包含大气气体吸收引起的路径损失。gydF4y2Ba |
| 包括镜头效果损失gydF4y2Ba | 选择包含由于大气中折射率变化而导致的镜头效果损失。这种效应仅在小的掠射角下显著。gydF4y2Ba |
有效地球半径gydF4y2Ba-有效地球半径gydF4y2Ba
标签部分gydF4y2Ba
指定gydF4y2Ba有效地球半径gydF4y2Ba作为其中之一:gydF4y2Ba
自动gydF4y2Ba- - - - - -gydF4y2Ba雷达设计师gydF4y2Ba根据参考大气自动计算半径。gydF4y2Ba大气模型gydF4y2Ba 有效地球半径gydF4y2Ba 没有气氛gydF4y2Ba6371公里gydF4y2Ba 统一的gydF4y2Ba6371公里gydF4y2Ba 标准gydF4y2Ba8719公里gydF4y2Ba 较低的纬度gydF4y2Ba9540公里gydF4y2Ba 中期纬度gydF4y2Ba8262公里gydF4y2Ba 高纬度gydF4y2Ba8308公里gydF4y2Ba 自定义gydF4y2Ba—该选项推荐用于高海拔几何图形。指定地球的有效半径为中的标量gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.这个参数通常设置为地球实际半径的4/3。gydF4y2Ba
表面类型gydF4y2Ba-表面类型gydF4y2Ba
标签部分gydF4y2Ba
指定雷达信号在其上传播的表面类型gydF4y2Ba无特色的gydF4y2Ba,gydF4y2Ba海gydF4y2Ba,gydF4y2Ba土地gydF4y2Ba,或gydF4y2Ba自定义gydF4y2Ba.gydF4y2Ba
无特色的gydF4y2Ba-完美光滑,完美反光的表面特征gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba表面类型gydF4y2Ba作为gydF4y2Ba无特色的gydF4y2Ba,您可以设置gydF4y2Ba传播的因素gydF4y2Ba参数,该参数仅在设置时可用gydF4y2Ba地球模型gydF4y2Ba来gydF4y2Ba弯曲的gydF4y2Ba.gydF4y2Ba传播的因素gydF4y2Ba是gydF4y2Ba从gydF4y2Ba默认情况下。gydF4y2Ba
海gydF4y2Ba——海洋特征gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba表面类型gydF4y2Ba作为gydF4y2Ba海gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 海国家数量gydF4y2Ba | 海况号,指定为以下之一:gydF4y2Ba
|
| 包括雷达传播因子gydF4y2Ba | 雷达传播系数是空间中某一点的实际磁场大小与自由空间中同一点的磁场大小之比。gydF4y2Ba 设置后,该参数才有效gydF4y2Ba地球模型gydF4y2Ba来gydF4y2Ba |
| 介电常数模型gydF4y2Ba | 介电常数模型,指定为下列之一:gydF4y2Ba
该参数仅适用于gydF4y2Ba包括雷达传播因子gydF4y2Ba被选中。gydF4y2Ba |
土地gydF4y2Ba——土地特征gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba表面类型gydF4y2Ba作为gydF4y2Ba土地gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 土地类型gydF4y2Ba | 土地类型,指定为下列之一:gydF4y2Ba
|
| 包括雷达传播因子gydF4y2Ba | 雷达传播系数是空间中某一点的实际磁场大小与自由空间中同一点的磁场大小之比。gydF4y2Ba 设置后,该参数才有效gydF4y2Ba地球模型gydF4y2Ba来gydF4y2Ba |
| 植被类型gydF4y2Ba | 植被类型,指定为下列之一:gydF4y2Ba
该参数仅适用于gydF4y2Ba包括雷达传播因子gydF4y2Ba被选中。gydF4y2Ba |
| 介电常数模型gydF4y2Ba | 介电常数模型,指定为下列之一:gydF4y2Ba
该参数仅适用于gydF4y2Ba包括雷达传播因子gydF4y2Ba被选中。gydF4y2Ba |
自定义gydF4y2Ba——自定义的表面gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba表面类型gydF4y2Ba作为gydF4y2Ba自定义gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 身高标准差gydF4y2Ba | 表面高度标准差,用标量表示gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 包括雷达传播因子gydF4y2Ba | 雷达传播系数是空间中某一点的实际磁场大小与自由空间中同一点的磁场大小之比。gydF4y2Ba 设置后,该参数才有效gydF4y2Ba地球模型gydF4y2Ba来gydF4y2Ba |
| 坡gydF4y2Ba | 用标量表示的表面斜率gydF4y2Ba 该参数仅适用于gydF4y2Ba包括雷达传播因子gydF4y2Ba被选中。gydF4y2Ba |
| 介电常数gydF4y2Ba | 表面介电常数,用复值标量F/m表示。默认值:(28.5 -gydF4y2BajgydF4y2Ba11.5) F / m。gydF4y2Ba |
的属性gydF4y2Ba自定义gydF4y2Ba表面类型gydF4y2Ba不依赖于频率。gydF4y2Ba
杂乱的属性gydF4y2Ba——混乱特征gydF4y2Ba
标签部分gydF4y2Ba
你可以指定这些杂波属性。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| γgydF4y2Ba | 表面γ(gydF4y2BaγgydF4y2Ba参数,指定为中的标量gydF4y2Ba 的gydF4y2BaγgydF4y2Ba值,用于在某一频率下运行的系统gydF4y2BafgydF4y2Ba是gydF4y2Ba γgydF4y2Ba=gydF4y2BaγgydF4y2Ba0gydF4y2Ba+ 5的日志gydF4y2Ba10gydF4y2Ba(gydF4y2BafgydF4y2Ba/gydF4y2BafgydF4y2Ba0gydF4y2Ba),gydF4y2Ba 在哪里gydF4y2BaγgydF4y2Ba0gydF4y2Ba的值gydF4y2BaγgydF4y2Ba在gydF4y2BafgydF4y2Ba0gydF4y2Ba= 10 GHz,由测量确定。gydF4y2Ba 该参数仅适用于gydF4y2Ba表面类型gydF4y2Ba被指定为gydF4y2Ba |
| 杂波速度规范gydF4y2Ba | 杂波速度,指定为以下之一:gydF4y2Ba
该参数仅适用于gydF4y2Ba表面类型gydF4y2Ba被指定为gydF4y2Ba |
| 偏振依赖性gydF4y2Ba | 极化依赖性,具体为gydF4y2Ba 该参数仅适用于gydF4y2Ba表面类型gydF4y2Ba被指定为gydF4y2Ba |
| 杂波速度gydF4y2Ba | 杂波速度,指定为标量gydF4y2Ba 该参数仅适用于gydF4y2Ba偏振依赖性gydF4y2Ba被指定为gydF4y2Ba |
| H-pol杂波速度gydF4y2Ba | 水平偏振的杂波速度,指定为中的标量gydF4y2Ba 该参数仅适用于gydF4y2Ba偏振依赖性gydF4y2Ba被指定为gydF4y2Ba |
| V-pol杂波速度gydF4y2Ba | 中的标量表示的垂直偏振杂波速度gydF4y2Ba 该参数仅适用于gydF4y2Ba偏振依赖性gydF4y2Ba被指定为gydF4y2Ba |
| 杂波速度标准差gydF4y2Ba | 杂波速度标准差(杂波速度扩散),用标量表示gydF4y2Ba米/秒gydF4y2Ba,gydF4y2Ba公里/小时gydF4y2Ba,gydF4y2Bami /人力资源gydF4y2Ba,或gydF4y2Ba节gydF4y2Ba.gydF4y2Ba |
降水gydF4y2Ba——降水特征gydF4y2Ba
标签部分gydF4y2Ba
指定gydF4y2Ba降水类型gydF4y2Ba在雷达信号传播过程中gydF4y2Ba没有一个gydF4y2Ba,gydF4y2Ba雨gydF4y2Ba,gydF4y2Ba雪gydF4y2Ba,gydF4y2Ba雾gydF4y2Ba,或gydF4y2Ba云gydF4y2Ba使用具有范围设置的雨、雪、雾和云模型。gydF4y2Ba
雨gydF4y2Ba——雨特点gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba降水类型gydF4y2Ba作为gydF4y2Ba雨gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 模型gydF4y2Ba | 雨模型,指定为以下其中之一:gydF4y2Ba
|
| 降水开始范围gydF4y2Ba | 中的标量指定的降水补丁的起始范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 降水范围程度gydF4y2Ba | 中的正标量指定的降水斑块的范围范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 雨率gydF4y2Ba | 长期统计降雨率,以毫米/小时为单位的标量指定。gydF4y2Ba |
| 统计百分比gydF4y2Ba | 统计百分比,指定为不小于0.001且不大于1的无因次标量。此参数返回指定百分比时间的衰减,仅适用于gydF4y2Ba模型gydF4y2Ba被指定为gydF4y2Ba电联gydF4y2Ba.gydF4y2Ba |
雪gydF4y2Ba——雪特点gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba降水类型gydF4y2Ba作为gydF4y2Ba雪gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 降水开始范围gydF4y2Ba | 中的标量指定的降水补丁的起始范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 降水范围程度gydF4y2Ba | 中的正标量指定的降水斑块的范围范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 雪率gydF4y2Ba | 雪率,具体为:gydF4y2Ba
|
| 水含量gydF4y2Ba | 液态水含量,以毫米/小时为单位的标量表示。该参数仅适用于gydF4y2Ba雪率gydF4y2Ba被指定为gydF4y2Ba自定义gydF4y2Ba.中等降雪速率为每小时1毫米至2.5毫米。gydF4y2Ba |
雷达设计师gydF4y2Ba使用了Gunn-East模型gydF4y2Ba[3]gydF4y2Ba计算雪损失。gydF4y2Ba
雾gydF4y2Ba——雾的特点gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba降水类型gydF4y2Ba作为gydF4y2Ba雾gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 降水开始范围gydF4y2Ba | 中的标量指定的降水补丁的起始范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 降水范围程度gydF4y2Ba | 中的正标量指定的降水斑块的范围范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 温度gydF4y2Ba | 雾环境温度,指定为标量gydF4y2BaCgydF4y2Ba或gydF4y2BaKgydF4y2Ba.gydF4y2Ba |
| 雾密度gydF4y2Ba | 雾液水密度,具体如下:gydF4y2Ba
|
| 水的密度gydF4y2Ba | 中以标量表示的液态水密度gydF4y2Bag / mgydF4y2Ba3.gydF4y2Ba或gydF4y2Ba克/厘米gydF4y2Ba3.gydF4y2Ba.该参数仅适用于gydF4y2Ba雾密度gydF4y2Ba被指定为gydF4y2Ba自定义gydF4y2Ba.gydF4y2Ba |
雷达设计师gydF4y2Ba采用ITU- r P.840-6中的ITU雾/云模型。该模型不推荐用于斜路径传播。gydF4y2Ba
云gydF4y2Ba——云特征gydF4y2Ba
选项卡分段gydF4y2Ba
如果指定gydF4y2Ba降水类型gydF4y2Ba作为gydF4y2Ba云gydF4y2Ba,您可以设置这些参数。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 降水开始范围gydF4y2Ba | 中的标量指定的降水补丁的起始范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 降水范围程度gydF4y2Ba | 中的正标量指定的降水斑块的范围范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba |
| 云类型gydF4y2Ba | 云的类型,指定为下列之一:gydF4y2Ba
|
| 水的密度gydF4y2Ba | 中以标量表示的液态水密度gydF4y2Bag / mgydF4y2Ba3.gydF4y2Ba或gydF4y2Ba克/厘米gydF4y2Ba3.gydF4y2Ba.该参数仅适用于gydF4y2Ba雾密度gydF4y2Ba被指定为gydF4y2Ba自定义gydF4y2Ba.gydF4y2Ba |
雷达设计师gydF4y2Ba采用ITU- r P.840-6中的ITU雾/云模型。该模型不推荐用于斜路径传播。gydF4y2Ba
度规gydF4y2Ba-雷达方程的求解与约束gydF4y2Ba
将来发布部分gydF4y2Ba
指定雷达方程求解的量和求解时要固定的量。gydF4y2Ba
检测概率gydF4y2Ba
 -计算发现概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)和其他具有最大范围约束的指标。中的标量指定最大范围gydF4y2Ba
-计算发现概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)和其他具有最大范围约束的指标。中的标量指定最大范围gydF4y2Ba米gydF4y2Ba,gydF4y2Ba公里gydF4y2Ba,gydF4y2Ba敝中断gydF4y2Ba,gydF4y2Ba英国《金融时报》gydF4y2Ba,或gydF4y2BakftgydF4y2Ba.gydF4y2Ba最大射程gydF4y2Ba
 -计算最大范围和其他指标的检测概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)的约束。将检测概率指定为十进制单位的标量。gydF4y2Ba
-计算最大范围和其他指标的检测概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)的约束。将检测概率指定为十进制单位的标量。gydF4y2Ba
控件中选中的约束出现在表的顶部gydF4y2Ba指标和要求gydF4y2Ba选项卡。gydF4y2Ba
指标和要求gydF4y2Ba-雷达设计限制gydF4y2Ba
选项卡gydF4y2Ba
使用gydF4y2Ba指标和要求gydF4y2BaTAB来调整和修改权衡分析所需的指标,以获得所需的性能并满足您的雷达设计需求。选项卡使用与a相同的颜色编码gydF4y2Ba红绿灯图表gydF4y2Ba并显示了表中的指标。gydF4y2Ba
若要生成数字度量的格式化报告,请单击gydF4y2Ba出口gydF4y2Ba在工具条上选择gydF4y2Ba生成指标报告gydF4y2Ba.gydF4y2Ba
| 度规gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 检测概率gydF4y2Ba | 被发现的概率,用无因次标量表示。如果指定,这是表中的第一个条目gydF4y2Ba 给定最大范围gydF4y2BaRgydF4y2Ba马克斯gydF4y2Ba中指定的gydF4y2Ba 信噪比gydF4y2BaavgydF4y2Ba(gydF4y2BaRgydF4y2Ba马克斯gydF4y2Ba) =gydF4y2BaDgydF4y2BaxgydF4y2Ba(gydF4y2BaPgydF4y2BadgydF4y2Ba,gydF4y2BaPgydF4y2Ba足总gydF4y2Ba,gydF4y2BaNgydF4y2Ba,西南),gydF4y2Ba 在信噪比gydF4y2BaavgydF4y2Ba是gydF4y2Ba可用的信噪比gydF4y2Ba,gydF4y2BaDgydF4y2BaxgydF4y2Ba是有效的gydF4y2Ba检测能力的因素gydF4y2Ba,gydF4y2BaPgydF4y2Ba足总gydF4y2Ba是误报的选择概率,gydF4y2BaNgydF4y2Ba为接收脉冲数,SW为转弯信号模型。gydF4y2Ba |
| 最大范围内gydF4y2Ba | 中的标量指定的最大范围gydF4y2Ba 给定所需的探测概率gydF4y2BaPgydF4y2BadgydF4y2Ba中指定的gydF4y2Ba 信噪比gydF4y2BaavgydF4y2Ba(gydF4y2BaRgydF4y2Ba马克斯gydF4y2Ba) =gydF4y2BaDgydF4y2BaxgydF4y2Ba(gydF4y2BaPgydF4y2BadgydF4y2Ba,gydF4y2BaPgydF4y2Ba足总gydF4y2Ba,gydF4y2BaNgydF4y2Ba,西南),gydF4y2Ba 在信噪比gydF4y2BaavgydF4y2Ba是gydF4y2Ba可用的信噪比gydF4y2Ba,gydF4y2BaDgydF4y2BaxgydF4y2Ba是有效的gydF4y2Ba检测能力的因素gydF4y2Ba,gydF4y2BaPgydF4y2Ba足总gydF4y2Ba是误报的选择概率,gydF4y2BaNgydF4y2Ba为接收脉冲数,SW为转弯信号模型。gydF4y2Ba |
| 最小可检测信号gydF4y2Ba | 中指定为标量的最小可检测信号gydF4y2Ba 最小可检测信号用gydF4y2Ba MDS =gydF4y2BakgydF4y2BaTgydF4y2Ba年代gydF4y2BaBgydF4y2BaDgydF4y2BaxgydF4y2Ba,gydF4y2Ba 在哪里gydF4y2BakgydF4y2Ba是玻尔兹曼常数,gydF4y2BaTgydF4y2Ba年代gydF4y2Ba为系统噪声温度,gydF4y2BaBgydF4y2Ba是带宽,还是gydF4y2BaDgydF4y2BaxgydF4y2Ba是可检测系数。gydF4y2Ba |
| 最小范围gydF4y2Ba | 中的标量指定的最小范围gydF4y2Ba 最小范围是用gydF4y2Ba RgydF4y2Ba最小值gydF4y2Ba=gydF4y2BacgydF4y2BaτgydF4y2Ba/ 2,gydF4y2Ba 在哪里gydF4y2BacgydF4y2Ba光速和gydF4y2BaτgydF4y2Ba是脉冲持续时间。gydF4y2Ba |
| 明确的范围gydF4y2Ba | 明确的范围,指定为中的标量gydF4y2Ba 明确的范围是用gydF4y2Ba RgydF4y2BauagydF4y2Ba=gydF4y2BacgydF4y2Ba×PRI / 2 =gydF4y2BacgydF4y2Ba/(2×脉冲重复频率),gydF4y2Ba 在哪里gydF4y2BacgydF4y2Ba为光速,PRI为脉冲重复间隔,PRF为脉冲重复频率。gydF4y2Ba |
| 距离分辨率gydF4y2Ba | 中的标量指定的范围分辨率gydF4y2Ba 计算距离分辨率使用gydF4y2Ba δgydF4y2BaRgydF4y2Ba=gydF4y2BacgydF4y2Ba/(2×gydF4y2BaBgydF4y2Ba),gydF4y2Ba 在哪里gydF4y2BacgydF4y2Ba光速和gydF4y2BaBgydF4y2Ba为脉冲带宽。gydF4y2Ba |
| 第一个盲速gydF4y2Ba | 第一个盲速度,指定为m/s的标量。gydF4y2Ba 计算最大无歧义径向速度(无歧义多普勒)gydF4y2Ba VgydF4y2BargydF4y2Ba马克斯gydF4y2Ba=gydF4y2BaλgydF4y2Ba×脉冲重复频率/ 4,gydF4y2Ba 在哪里gydF4y2BaλgydF4y2Ba为雷达波长,PRF为脉冲重复频率。gydF4y2Ba |
| 范围内利率决议gydF4y2Ba | 距离速率分辨率,指定为m/s的标量。gydF4y2Ba 距离速率分辨率计算使用gydF4y2Ba δgydF4y2BaVgydF4y2BargydF4y2Ba=gydF4y2BaλgydF4y2Ba×脉冲重复频率/ (2gydF4y2BaN)gydF4y2Ba,gydF4y2Ba 在哪里gydF4y2BaλgydF4y2Ba为雷达波长,PRF为脉冲重复频率,gydF4y2BaNgydF4y2Ba接收到的脉冲数。gydF4y2Ba |
| 精度范围gydF4y2Ba | 中的标量指定的范围精度gydF4y2Ba 计算线性调频(LFM)脉冲的距离精度gydF4y2Ba
在哪里gydF4y2BacgydF4y2Ba为光速,信噪比为可用信噪比,gydF4y2BaBgydF4y2Ba是脉冲带宽,和gydF4y2BabgydF4y2BargydF4y2Ba2gydF4y2Ba是距离偏差。gydF4y2Ba |
| 方位精度gydF4y2Ba | 中指定为标量的方位角精度gydF4y2Ba 的方位角精度gydF4y2Ba米gydF4y2Ba-元均匀线性阵列(ULA)的计算gydF4y2Ba
在哪里gydF4y2BaθgydF4y2BaegydF4y2Ba为方位角波束宽度,信噪比为可用信噪比,gydF4y2BakgydF4y2Ba是波束宽度因子(gydF4y2BakgydF4y2Ba= 0.89gydF4y2Ba对于ULA),以及gydF4y2BabgydF4y2BaθgydF4y2Ba为方位角偏差。gydF4y2Ba |
| 高程精度gydF4y2Ba | 标高精度,用标量表示gydF4y2Ba 仰角精度gydF4y2Ba米gydF4y2Ba-元均匀线性阵列(ULA)的计算gydF4y2Ba
在哪里gydF4y2BaθgydF4y2BaegydF4y2Ba为高程波束宽度,信噪比为可用信噪比,gydF4y2BakgydF4y2Ba是波束宽度因子(gydF4y2BakgydF4y2Ba= 0.89gydF4y2Ba对于ULA),以及gydF4y2BabgydF4y2BaθgydF4y2Ba是仰角偏差。gydF4y2Ba |
| 率精度范围gydF4y2Ba | 距离速率精度,指定为m/s的标量。gydF4y2Ba 的范围率精度gydF4y2BaNgydF4y2Ba在相干处理间隔期间相干处理的脉冲用gydF4y2Ba
其中PRF为脉冲重复频率,gydF4y2BaλgydF4y2Ba为雷达波长,信噪比为可用信噪比,gydF4y2BaBgydF4y2Ba是脉冲带宽,和gydF4y2BabgydF4y2BarrgydF4y2Ba是范围率偏差。gydF4y2Ba |
| 真迹概率gydF4y2Ba | 真实轨迹的概率,用无因次标量表示。gydF4y2Ba 用常用的门历史算法计算真实轨迹的概率。有关更多细节,请参见gydF4y2Ba |
| 误跟踪概率gydF4y2Ba | 误迹的概率,用无因次标量表示。gydF4y2Ba 用常用的门历史算法计算假跟踪的概率。有关更多细节,请参见gydF4y2Ba |
| 有效各向同性辐射功率gydF4y2Ba | 中的标量表示的有效各向同性辐射功率gydF4y2Ba 有效辐射功率用gydF4y2Ba ERP =gydF4y2BaPgydF4y2BatgydF4y2BaGgydF4y2BatxgydF4y2Ba,gydF4y2Ba 在哪里gydF4y2BaPgydF4y2BatgydF4y2Ba峰值传输功率和gydF4y2BaGgydF4y2BatxgydF4y2Ba是发射机天线增益。gydF4y2Ba |
| Power-Aperture产品gydF4y2Ba | 功率孔径的乘积,指定为标量gydF4y2Ba |
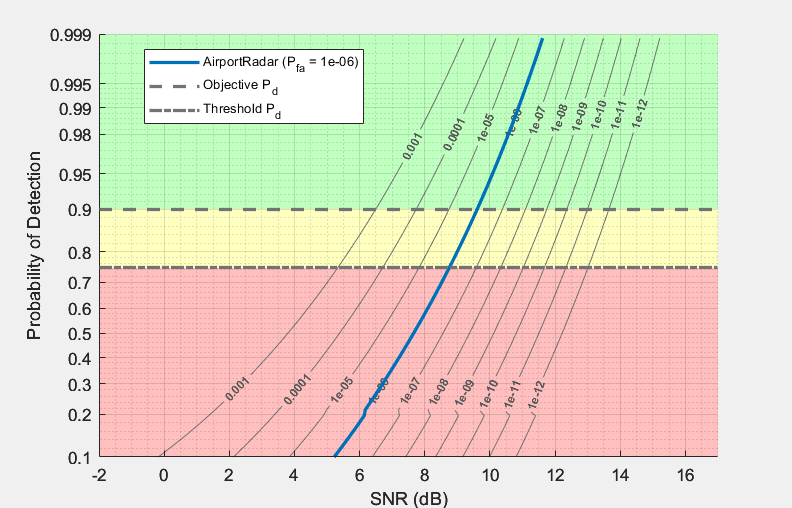
信噪比与范围gydF4y2Ba-可用信噪比可视化gydF4y2Ba
图选项卡gydF4y2Ba
对于每一个雷达设计环节,gydF4y2Ba雷达设计师gydF4y2Ba显示了gydF4y2Ba可用的信噪比gydF4y2Ba(信噪比)是目标距离的函数。图中显示了最大航程要求和agydF4y2Ba红绿灯图表gydF4y2Ba基于可检测系数(要求的信噪比)值。gydF4y2Ba
此图显示了默认设置下机载雷达的信噪比图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba

若要生成脚本,为当前选定的雷达重新创建信噪比图,请单击gydF4y2Ba出口gydF4y2Ba在工具条上选择gydF4y2Ba导出信噪比与范围MATLAB脚本gydF4y2Ba.gydF4y2Ba
场景几何gydF4y2Ba-几何和环境可视化gydF4y2Ba
图选项卡gydF4y2Ba
对于每一个雷达设计环节,gydF4y2Ba雷达设计师gydF4y2Ba显示一个gydF4y2Ba场景几何gydF4y2Ba选项卡,显示此信息:gydF4y2Ba
环境(弯曲的地球,平坦的地球,自由的空间)gydF4y2Ba
雷达天线高度gydF4y2Ba
目标高度和在不同范围内的位置(固定高度或固定高度)gydF4y2Ba
雷达天线图显示应用的倾斜角度gydF4y2Ba
此图显示了在曲面地球上使用默认设置的一个天气雷达的场景几何图形。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba

分析gydF4y2Ba-距离/多普勒、可探测性和其他图gydF4y2Ba
将来发布按钮gydF4y2Ba
指定用于可视化和分析雷达设计的图。gydF4y2Ba
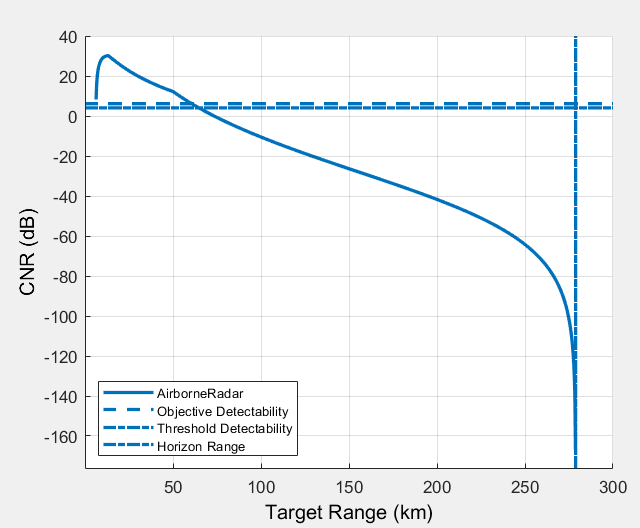
中国北车与范围gydF4y2Ba
 -查看所有设计的杂波噪声比和范围gydF4y2Ba
-查看所有设计的杂波噪声比和范围gydF4y2Ba若要将杂波噪声比(CNR)可视化为雷达设计的距离函数,请单击gydF4y2Ba中国北车与范围gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba在dB中显示CNR并显示地平线范围。gydF4y2Ba
此图显示了默认设置下机载雷达的杂波噪声比图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba
链路预算gydF4y2Ba
 -检查当前所选雷达的增益和损耗gydF4y2Ba
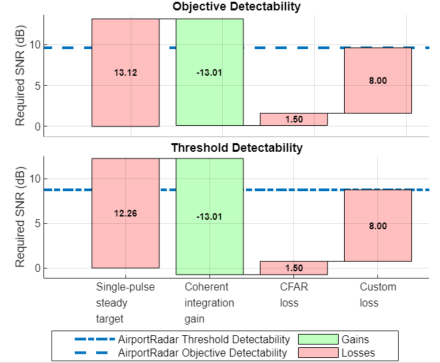
-检查当前所选雷达的增益和损耗gydF4y2Ba若要可视化雷达设计的增益和损耗,请单击gydF4y2Ba链路预算gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba对影响结果的雷达信号处理链的几个组件进行建模gydF4y2Ba检测能力的因素gydF4y2Ba.该应用程序显示了一个瀑布图,显示了个人的损失和收益,有助于增加所需的信号能量。这个图表叫做雷达链路预算。gydF4y2Ba
红色表示的损失增加了所需的信噪比阈值。gydF4y2Ba
用绿色表示的增益降低了所需的信噪比阈值。gydF4y2Ba
从左到右扫描图,看看随着这些组件的添加,可检测系数是如何变化的:gydF4y2Ba
Steady-target单脉冲检测能力gydF4y2Ba
集成获得gydF4y2Ba
波动的损失gydF4y2Ba
二进制集成损失gydF4y2Ba
CFAR损失gydF4y2Ba
超过损失gydF4y2Ba
MTI的损失gydF4y2Ba
梁形状损失gydF4y2Ba
扫描部门损失gydF4y2Ba
此图显示了一个机场雷达的默认设置的链接预算图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba
环境损失gydF4y2Ba
 —查看当前所选雷达的环境损失gydF4y2Ba
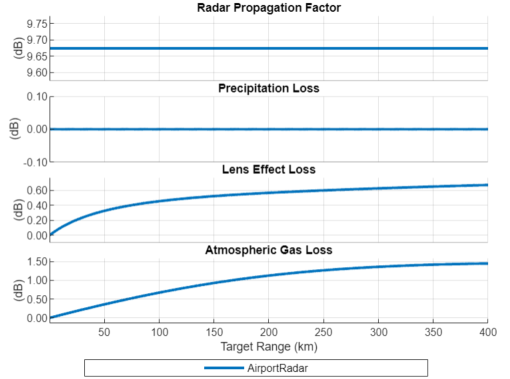
—查看当前所选雷达的环境损失gydF4y2Ba若要在操作环境中可视化雷达设计的距离相关损失组件,请单击gydF4y2Ba环境损失gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba显示四个与距离相关的损失分量,它们对应于不同的大气和传播效应:gydF4y2Ba
沉淀损失gydF4y2Ba
大气气体损失gydF4y2Ba
透镜效应损失gydF4y2Ba
雷达传播因素gydF4y2Ba
此图显示了使用高纬度大气模型的默认设置的一个机场雷达的环境损失图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba
Pd和范围gydF4y2Ba
 -显示被发现的概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)对比所有设计的范围gydF4y2Ba
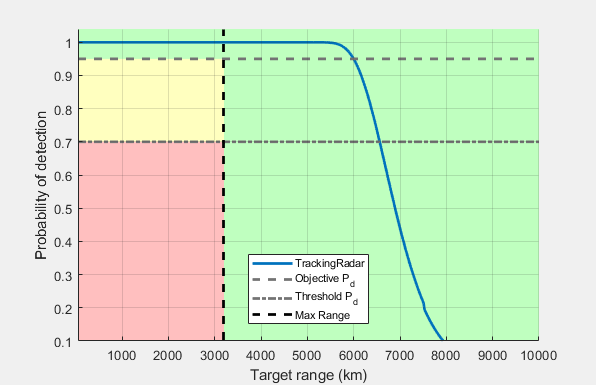
-显示被发现的概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)对比所有设计的范围gydF4y2Ba若要将雷达设计的探测概率作为距离的函数可视化,请单击gydF4y2BaPd和范围gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba显示接收端输出处检测到的概率(有效)gydF4y2BaPgydF4y2BadgydF4y2Ba)作为目标距离的函数。图中显示了最大航程要求和agydF4y2Ba红绿灯图表gydF4y2Ba基于所需的gydF4y2BaPgydF4y2BadgydF4y2Ba值。gydF4y2Ba
此图显示了默认设置下一个跟踪雷达的探测概率与距离图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba
Pd和信噪比gydF4y2Ba
 -显示被发现的概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)对比所有设计的信噪比。gydF4y2Ba
-显示被发现的概率(gydF4y2BaPgydF4y2BadgydF4y2Ba)对比所有设计的信噪比。gydF4y2Ba若要将雷达设计的探测概率作为信噪比的函数可视化,请单击gydF4y2BaPd和信噪比gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba显示接收端输出处检测到的概率(有效)gydF4y2BaPgydF4y2BadgydF4y2Ba)为接收信噪比的函数。图中显示了Pd要求和agydF4y2Ba红绿灯图表gydF4y2Ba基于所需的gydF4y2BaPgydF4y2BadgydF4y2Ba值。gydF4y2Ba
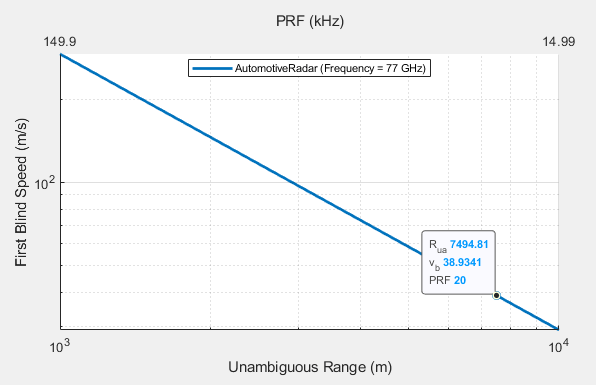
距离/多普勒报道gydF4y2Ba
 -探索当前所选雷达的距离/多普勒空间gydF4y2Ba
-探索当前所选雷达的距离/多普勒空间gydF4y2Ba若要可视化雷达设计的无歧义距离/多普勒覆盖区域,请单击gydF4y2Ba距离/多普勒报道gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba显示第一盲速度的对数-对数图作为明确范围(较低)的函数gydF4y2BaxgydF4y2Ba-轴)和PRF(上gydF4y2BaxgydF4y2Ba设在)。图上的每条实线代表一个雷达设计。不同载波频率的设计显示为平行线。gydF4y2Ba
此图显示了默认设置下的汽车雷达的距离/多普勒覆盖图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba
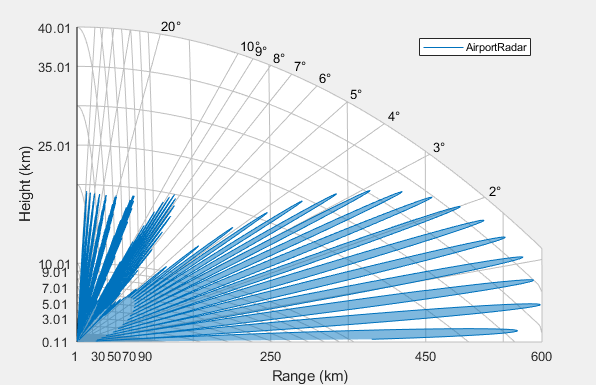
垂直覆盖gydF4y2Ba
 -绘制当前选定雷达的布莱克图gydF4y2Ba
-绘制当前选定雷达的布莱克图gydF4y2Ba若要可视化雷达设计的距离-高度-角度关系,请单击gydF4y2Ba垂直覆盖gydF4y2Ba在将来发布。gydF4y2Ba
雷达设计师gydF4y2Ba显示所选雷达的垂直覆盖图。垂直覆盖图,也称为gydF4y2Barange-height-angle图表gydF4y2Ba或gydF4y2Ba布莱克图表gydF4y2Ba,显示到目标的距离、目标的高度和传感器发射光线的初始仰角之间的关系。gydF4y2Ba
该图显示了一个机场雷达在默认设置下的垂直覆盖图。有关更多信息,请参见gydF4y2Ba雷达设计配置gydF4y2Ba.gydF4y2Ba
若要生成脚本,为当前选定的雷达重新创建垂直覆盖图,请单击gydF4y2Ba出口gydF4y2Ba在工具条上选择gydF4y2Ba
导出垂直覆盖MATLAB脚本gydF4y2Ba.gydF4y2Ba







编程使用gydF4y2Ba
更多关于gydF4y2Ba
雷达设计配置gydF4y2Ba
雷达设计师gydF4y2Ba包括雷达配置,使您能够在雷达设计之间切换,复制雷达和删除雷达。gydF4y2Ba
该表显示了内置配置的默认参数值。gydF4y2Ba
| 类别gydF4y2Ba | 财产gydF4y2Ba | 雷达gydF4y2Ba | ||||
|---|---|---|---|---|---|---|
| 机载雷达gydF4y2Ba | 机场的雷达gydF4y2Ba | 汽车雷达gydF4y2Ba | 跟踪雷达gydF4y2Ba | 气象雷达gydF4y2Ba | ||
| 一般gydF4y2Ba | 图标gydF4y2Ba | |||||
| 描述gydF4y2Ba | 远程机载监视雷达gydF4y2Ba | 终端机场监视gydF4y2Ba | 用于自动巡航控制等应用的汽车雷达gydF4y2Ba | 地基,线索跟踪雷达系统gydF4y2Ba | 晴空天气雷达gydF4y2Ba | |
| 灵感来自于gydF4y2Ba | 载于gydF4y2Ba[5]gydF4y2Ba | ASR-9gydF4y2Ba | 博世LRR3, TI雷达gydF4y2Ba | 眼镜蛇戴恩gydF4y2Ba | NEXRAD (VCP 32)gydF4y2Ba | |
| 主要gydF4y2Ba | 频率gydF4y2Ba | 450兆赫gydF4y2Ba | 2.8 GHzgydF4y2Ba | 77 GHzgydF4y2Ba | 1.25 GHzgydF4y2Ba | 2.8 GHzgydF4y2Ba |
| 频带gydF4y2Ba | 超高频gydF4y2Ba | 年代gydF4y2Ba | WgydF4y2Ba | lgydF4y2Ba | 年代gydF4y2Ba | |
| 带宽gydF4y2Ba | 4兆赫gydF4y2Ba | 1.5兆赫gydF4y2Ba | 300兆赫gydF4y2Ba | 20 MHzgydF4y2Ba | 0.5兆赫gydF4y2Ba | |
| 峰值功率gydF4y2Ba | 200千瓦gydF4y2Ba | 1.1兆瓦gydF4y2Ba | 30兆瓦gydF4y2Ba | 15兆瓦gydF4y2Ba | 500千瓦gydF4y2Ba | |
| 脉冲宽度gydF4y2Ba | 200μsgydF4y2Ba | 1μsgydF4y2Ba | 50μsgydF4y2Ba | 1毫秒gydF4y2Ba | 1.5μsgydF4y2Ba | |
| 脉冲重复频率gydF4y2Ba | 300赫兹gydF4y2Ba | 1千赫gydF4y2Ba | 20千赫gydF4y2Ba | 1千赫gydF4y2Ba | 320赫兹gydF4y2Ba | |
| 硬件gydF4y2Ba | 噪声温度gydF4y2Ba | 1500 K(8分贝噪音,参考温度290K)gydF4y2Ba | 950 KgydF4y2Ba | 8000 KgydF4y2Ba | 800 KgydF4y2Ba | 450 KgydF4y2Ba |
| 天线和扫描gydF4y2Ba | 天线高度gydF4y2Ba | 6096米(20,000英尺)gydF4y2Ba | 10米gydF4y2Ba | 1米gydF4y2Ba | 75米gydF4y2Ba | 20米gydF4y2Ba |
| 天线倾斜gydF4y2Ba | 1°gydF4y2Ba | 0.5°gydF4y2Ba | 0gydF4y2Ba | 10°gydF4y2Ba | 0.5°gydF4y2Ba | |
| 极化gydF4y2Ba | 水平gydF4y2Ba | 水平gydF4y2Ba | 水平gydF4y2Ba | 水平gydF4y2Ba | 水平gydF4y2Ba | |
| 获得gydF4y2Ba | 从波束宽度gydF4y2Ba | 从波束宽度gydF4y2Ba | 从波束宽度gydF4y2Ba | 从波束宽度gydF4y2Ba | 手册gydF4y2Ba | |
| 方位:8°gydF4y2Ba | 方位:1.5°gydF4y2Ba | 方位:30°gydF4y2Ba | 方位:1°gydF4y2Ba | 45分贝gydF4y2Ba | ||
| 海拔:90°gydF4y2Ba | 海拔高度:5°gydF4y2Ba | 海拔高度:10°gydF4y2Ba | 高度:1°gydF4y2Ba | |||
| 扫描模式gydF4y2Ba | 电子gydF4y2Ba | 机械gydF4y2Ba | N/AgydF4y2Ba | N/AgydF4y2Ba | 机械gydF4y2Ba | |
| 方位±30°gydF4y2Ba | 满360°gydF4y2Ba | 体积扫描:方位角:全360°。仰角:0.5°至5°gydF4y2Ba | ||||
| 扫描时间gydF4y2Ba | 0.05秒gydF4y2Ba | 5 sgydF4y2Ba | N/AgydF4y2Ba | N/AgydF4y2Ba | 10分钟gydF4y2Ba | |
| 检测gydF4y2Ba | 误报概率gydF4y2Ba | 10gydF4y2Ba6gydF4y2Ba | 10gydF4y2Ba6gydF4y2Ba | 10gydF4y2Ba6gydF4y2Ba | 10gydF4y2Ba6gydF4y2Ba | 10gydF4y2Ba3gydF4y2Ba |
| CPI中的脉冲数gydF4y2Ba | 18gydF4y2Ba | 20.gydF4y2Ba | 256gydF4y2Ba | 1gydF4y2Ba | 64gydF4y2Ba | |
| 数量的cpi (gydF4y2Ba | 1gydF4y2Ba | 1gydF4y2Ba | 1gydF4y2Ba | 1gydF4y2Ba | 1gydF4y2Ba | |
| 损失和其他投入gydF4y2Ba | 定制的损失gydF4y2Ba | 4 dBgydF4y2Ba | 8分贝gydF4y2Ba | 2 dBgydF4y2Ba | 2 dBgydF4y2Ba | 2 dBgydF4y2Ba |
| 其他投入gydF4y2Ba | STC)gydF4y2Ba“上”gydF4y2Ba使用默认参数gydF4y2Ba |
CFARgydF4y2Ba“上”gydF4y2Ba使用默认参数gydF4y2Ba |
N/AgydF4y2Ba | N/AgydF4y2Ba | N/AgydF4y2Ba | |
CFARgydF4y2Ba“上”gydF4y2Ba使用默认参数gydF4y2Ba |
||||||
结核杆菌感染gydF4y2Ba“上”gydF4y2Ba使用默认参数gydF4y2Ba |
结核杆菌感染gydF4y2Ba“上”gydF4y2Ba使用默认参数gydF4y2Ba |
|||||
| 接收增益:10dbgydF4y2Ba | ||||||
提示gydF4y2Ba
使用gydF4y2BaCtrl + ZgydF4y2Ba撤消修改。使用gydF4y2BaCtrl + YgydF4y2Ba重做未完成的修改。gydF4y2Ba
参考文献gydF4y2Ba
[1]建议ITU-R P.835-6(12/2017)。“参考标准大气。”日内瓦:国际电信联盟,2017,gydF4y2Bahttps://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.835-6-201712-I!!PDF-E.pdfgydF4y2Ba.gydF4y2Ba
[2]巴顿,大卫·K。gydF4y2Ba现代雷达的雷达方程gydF4y2Ba.诺伍德,MA: Artech House, 2013。gydF4y2Ba
葛恩,K. L. S.和T. W. R.东。"降水粒子的微波特性"gydF4y2Ba皇家气象学会季刊gydF4y2Ba80年,没有。346(1954年10月):522-45。gydF4y2Bahttps://doi.org/10.1002/qj.49708034603gydF4y2Ba.gydF4y2Ba
[4] r.m O'Donnell“雷达系统工程”。IEEE AES学会,IEEE新罕布什尔州分会,雷达系统课程,2010年1月。gydF4y2Ba
[5]病房,J。机载雷达的时空自适应处理TR-1015,麻省理工学院林肯实验室,1994年12月。gydF4y2Bahttps://apps.dtic.mil/dtic/tr/fulltext/u2/a293032.pdfgydF4y2Ba
查尔斯·S·沃森gydF4y2Ba系统工程分析、设计和开发:概念、原则和实践gydF4y2Ba.第二版。系统工程与管理Wiley系列。霍博肯,新泽西州:John Wiley & Sons Inc, 2016。gydF4y2Ba
版本历史gydF4y2Ba
介绍了R2021agydF4y2Ba
另请参阅gydF4y2Ba
应用程序gydF4y2Ba
- 雷达方程计算器gydF4y2Ba|gydF4y2Ba脉冲波形分析仪gydF4y2Ba|gydF4y2Ba传感器阵列分析仪gydF4y2Ba
功能gydF4y2Ba
radareqpowgydF4y2Ba|gydF4y2BaradareqrnggydF4y2Ba|gydF4y2BaradareqsnrgydF4y2Ba|gydF4y2BaradarmetricplotgydF4y2Ba|gydF4y2BaradarbudgetplotgydF4y2Ba
您也可以从以下列表中选择网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba