用多目标优化方法规划核燃料处置gydF4y2Ba
这个例子展示了如何表述和求解一个具有整数约束的大型非线性多目标问题。这个问题改编自Montonen、Ranta和MäkelägydF4y2Ba[1]gydF4y2Ba.其目标是处理乏燃料,目标是将成本降至最低,将乏燃料组件从反应堆移出到掩埋之间的时间降至最低,并将每次储存的乏燃料组件数量降至最低。这个问题是一个多时期规划问题,每个时期是五年。gydF4y2Ba
模型概述gydF4y2Ba
核反应堆产生的废物必须被长期掩埋。2022世界杯八强谁会赢?这些废料是含有乏核燃料的2022世界杯八强谁会赢?燃料棒组件。从反应堆取出时,这些组件是热的,具有放射性,然后逐渐降低。在期gydF4y2BatgydF4y2Ba,辐射水平由带参数向量的双指数衰减函数给出gydF4y2BaugydF4y2Ba:gydF4y2Ba
.gydF4y2Ba
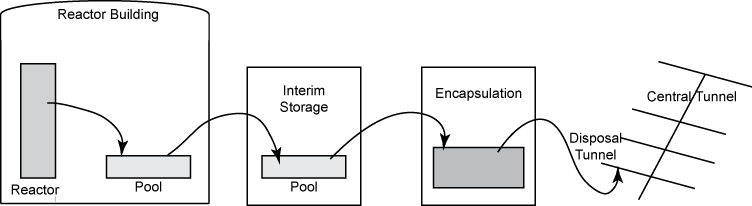
在冷却到可以被转移到一个临时储存设施之前,每个组件都被放置在反应堆建筑的一个水池中。在那里,它再次被放入一个水池中。当组件进一步冷却后,它可以与其他组件封装在一个铜铁罐中,然后埋在处理隧道中。所有处置隧道都连接中央隧道。gydF4y2Ba
该图说明了核燃料组件从反应堆到最终处置的各个阶段。gydF4y2Ba
问题变量与一个时间表有关,其中每个时间单位代表5年。时间段从1开始。gydF4y2Ba
与模型相关的常量gydF4y2Ba
ZgydF4y2Ba是燃料组件从反应堆中取出的最后一段时间。删除时间是gydF4y2Ba1: ZgydF4y2Ba.在[1],gydF4y2BaZgydF4y2Ba= 11。每段时间为5年,所以最后一次拆除燃料组件的时间是55年。gydF4y2Ba
NgydF4y2Ba是毒气罐最后被埋的时间。埋葬时期gydF4y2Ba1: NgydF4y2Ba.在[1],gydF4y2BaNgydF4y2Ba= 19。每个时间段是5年,所以最后一个可以埋毒气罐的时间段是95年。gydF4y2Ba
Z = 11;N = 19;gydF4y2Ba
一个gydF4y2Ba是第一次处置前最后一次清除的时间。gydF4y2Ba
bgydF4y2Ba是最后一次清除发生的处理期间。gydF4y2Ba
= 5;b = 6;gydF4y2Ba
RgydF4y2Ba存储程序集的最小周期数。gydF4y2Ba
R = 4;gydF4y2Ba
KgydF4y2Ba是可装入一个筒的最大组件数。gydF4y2Ba
K = 4;gydF4y2Ba
TgydF4y2Ba是一段时间内处理的罐的最小数量。gydF4y2Ba
T = 50;gydF4y2Ba
UgydF4y2Ba是一段时间内处理的罐的最大数量。gydF4y2Ba
U = 500;gydF4y2Ba
问gydF4y2Ba是处置隧道的长度,单位为米。gydF4y2Ba
Q = 350;gydF4y2Ba
(我)gydF4y2Ba程序集的数量是否被及时移除gydF4y2Ba我gydF4y2Ba.gydF4y2Ba
M = 300 - 60*(-1).^(1: z);gydF4y2Ba% 360表示奇数,240表示偶数gydF4y2Ba
(i, j)gydF4y2Ba组件从拆卸起的储存时间是多长gydF4y2Ba我gydF4y2Ba时期gydF4y2BajgydF4y2Ba,在那里gydF4y2Ba我< = ZgydF4y2Ba而且gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
一个= 0 (Z, N);gydF4y2Ba为gydF4y2Bai = 1: ZgydF4y2Ba为gydF4y2Baj = i:N A(i, j) = j - i;gydF4y2Ba结束gydF4y2Ba结束gydF4y2Ba
p (i, j)gydF4y2Ba组件从拆卸时的衰变热功率(单位为瓦)是多少gydF4y2Ba我gydF4y2Ba时期gydF4y2BajgydF4y2Ba,在那里gydF4y2Ba我< = ZgydF4y2Ba而且gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
以下参数将表A2中的P_{i,j}从[1]匹配到每个参数中的1以内gydF4y2Ba%条目(分数错误<= 1/250)。gydF4y2BaU = [503 0.1346 260 0.0231];myfun = @ (d)轮(u (1) * exp (- u (2) * d) + u (3) * exp (- u (4) * d));页= myfun (1: N);j = 0 (Z, N);gydF4y2Ba为gydF4y2Ba我= 2:ZgydF4y2Ba为gydF4y2BaJ = 1:i pij(i, J) = 13;gydF4y2Ba%虚拟值,因为j >= i没有出现。gydF4y2Ba结束gydF4y2Ba结束gydF4y2Ba为gydF4y2Bai=1:Z pij(i,i:end) = PP(1:(N-i+1));gydF4y2Ba%相同的衰减剖面为所有清除时间gydF4y2Ba结束gydF4y2Ba
pmaxupgydF4y2Ba是一个罐的平均功率的上限,和gydF4y2BapmaxlowgydF4y2Ba是下界。gydF4y2Ba
pmaxup = 1830;pmaxlow = 1300;gydF4y2Ba
dDTupgydF4y2Ba处置隧道之间的距离是上限,和gydF4y2BadDTlowgydF4y2Ba是下界。gydF4y2Ba
dDTup = 50;dDTlow = 25;gydF4y2Ba
dCAupgydF4y2Ba处理隧道中,和的容器之间距离的上限是gydF4y2BadCAlowgydF4y2Ba是下界。gydF4y2Ba
dCAup = 15;dCAlow = 6;gydF4y2Ba
[1]中没有给出与业务相关的费用。本示例假设以下值:gydF4y2Ba
中科院gydF4y2Ba是每个周期一个组装的存储成本。gydF4y2Ba独联体gydF4y2Ba是临时存储中每个周期一个组件的存储成本。gydF4y2BaCspgydF4y2Ba是每个程序集的存储位置的成本。gydF4y2BaCcagydF4y2Ba是一个罐子的价格。gydF4y2Ba欧共体语言教学大纲的gydF4y2Ba是每个周期操作封装设施的成本。gydF4y2BaCdtgydF4y2Ba是每米处理隧道的费用。gydF4y2Ba有条件现金转移支付gydF4y2Ba是中心隧道每米的造价。gydF4y2Ba
中科院= 50;独联体= 60;Csp = 10;Cca = 1200;欧共体语言教学大纲的= 300;Cdt = 3000;有条件现金援助= 5000;gydF4y2Ba
问题优化变量gydF4y2Ba
为MATLAB®创建问题,使用基于问题的方法。为大多数量定义连续变量。gydF4y2Ba
该图说明了与程序集移动相关的变量。gydF4y2Ba

x (i, j)gydF4y2Ba程序集的数量是否被及时移除gydF4y2Ba我gydF4y2Ba并及时处置gydF4y2BajgydF4y2Ba,gydF4y2Ba我< = ZgydF4y2Ba而且gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
x = optimvar (gydF4y2Ba“x”gydF4y2Ba, Z, N,下界= 0,UpperBound = U * K);gydF4y2Ba
z (i, j)gydF4y2Ba程序集的数量是否被及时移除gydF4y2Ba我gydF4y2Ba并随时储存起来gydF4y2BajgydF4y2Ba,gydF4y2Ba我< = ZgydF4y2Ba而且gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
z = optimvar (gydF4y2Ba“z”gydF4y2Ba, Z, N,下界= 0,UpperBound = U * K * N / 2);gydF4y2Ba
y (j)gydF4y2Ba每次处理的罐的数量是多少gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
y = optimvar (gydF4y2Ba“y”gydF4y2BaN下界= 0,UpperBound = U);gydF4y2Ba
pmaxgydF4y2Ba是一个罐的最大平均功率。gydF4y2Ba
pmax = optimvar (gydF4y2Ba“pmax”gydF4y2Ba下界= pmaxlow UpperBound = pmaxup);gydF4y2Ba
该图说明了与处理隧道有关的数量。gydF4y2Ba

滴滴涕gydF4y2Ba是相邻处理隧道之间的距离。gydF4y2Ba
dDT = optimvar (gydF4y2Ba“dDT”gydF4y2Ba下界= dDTlow UpperBound = dDTup);gydF4y2Ba
dCAgydF4y2Ba是处理隧道中相邻罐之间的距离。稍后,在本例的Problem Constraints部分,使用函数计算这个距离gydF4y2BaggydF4y2Ba.gydF4y2Ba
这个数字与封装时间有关。gydF4y2Ba

将以下变量指定为整数类型的二进制变量,其下界为0,上界为1。gydF4y2Ba
ej (j)gydF4y2Ba指示封装设施在此期间处于运行状态gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
ej = optimvar (gydF4y2Ba“ej”gydF4y2BaN =类型gydF4y2Ba“整数”gydF4y2Ba下界= 0,UpperBound = 1);gydF4y2Ba
ejON (j)gydF4y2Ba指示从周期的开始开始封装gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
ejON = optimvar (gydF4y2Ba“ejON”gydF4y2BaN =类型gydF4y2Ba“整数”gydF4y2Ba下界= 0,UpperBound = 1);gydF4y2Ba
ejOFF (j)gydF4y2Ba指示封装在周期的开始处结束gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
ejOFF = optimvar (gydF4y2Ba“ejOFF”gydF4y2BaN =类型gydF4y2Ba“整数”gydF4y2Ba下界= 0,UpperBound = 1);gydF4y2Ba
这个数字与程序集可以被处理的次数有关,gydF4y2Barij = 1gydF4y2Ba.这些时刻开始于gydF4y2BaejON = 1gydF4y2Ba和结束时gydF4y2Basij = 1gydF4y2Ba.gydF4y2Ba

sij (i, j)gydF4y2Ba指示实时删除的程序集gydF4y2Ba我gydF4y2Ba从开始的时候就不能再处理了吗gydF4y2BajgydF4y2Ba,gydF4y2Ba我< = ZgydF4y2Ba而且gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
sij = optimvar (gydF4y2Ba“sij”gydF4y2Ba、Z N, Type =gydF4y2Ba“整数”gydF4y2Ba下界= 0,UpperBound = 1);gydF4y2Ba
它们(i, j)gydF4y2Ba指示实时删除的程序集gydF4y2Ba我gydF4y2Ba可以及时处理吗gydF4y2BajgydF4y2Ba,gydF4y2Ba我< = ZgydF4y2Ba而且gydF4y2Baj < = NgydF4y2Ba.gydF4y2Ba
rij = optimvar (gydF4y2Ba“它们”gydF4y2Ba、Z N, Type =gydF4y2Ba“整数”gydF4y2Ba下界= 0,UpperBound = 1);gydF4y2Ba
现在定义了所有优化变量和问题参数。gydF4y2Ba
问题的约束gydF4y2Ba
创建一个优化问题来保持目标和约束条件。gydF4y2Ba
概率= optimproblem;gydF4y2Ba
约束数与[1]中的方程匹配。前三个约束与临时存储中的程序集数量有关。gydF4y2Ba
jnot1 = 2: N;prob.Constraints。con10 = z(:,1) - M(:) + x(:,1) == 0;prob.Constraints。cons11 = z (:, jnot1) - z (:, (jnot1 - 1)) + x (:, jnot1) = = 0;prob.Constraints。con12 = z(:,N) == 0;gydF4y2Ba
设置一次释放所有程序集的约束。gydF4y2Ba
prob.Constraints。con13 = sum(sij,2) == 1;gydF4y2Ba
定义的变量gydF4y2Ba它们gydF4y2Ba通过设置以下约束。gydF4y2Ba
cons15 = optimconstr (Z, N);con15 (:,1) = rij(:,1) == -sij(:,1) + ejON(1);gydF4y2Ba%方程14gydF4y2Bacon15 (:,jnot1) = rij(:,jnot1) ==gydF4y2Ba...gydF4y2Barij (:, jnot1-1)——sij (:, jnot1) + repmat (ejON (jnot1)、Z 1);gydF4y2Ba%方程15gydF4y2Baprob.Constraints。cons15 = cons15;gydF4y2Ba
设置只在运行封装设施时发生处理的约束。gydF4y2Ba
con16 = rij <= repmat(ej', Z, 1);prob.Constraints。cons16 = cons16;gydF4y2Ba
指定不超过生产能力的约束。gydF4y2Ba
prob.Constraints。con17 = x <= U*K*rij;gydF4y2Ba
下一个约束强制程序集在处理前足够冷却。gydF4y2Ba
prob.Constraints。con18 = x.*(A - R) >= 0;gydF4y2Ba
以下约束与封装功能有关。这些约束强制该设施只能打开和关闭一次,这意味着所有的罐都被封装在一次运行中,gydF4y2Ba
prob.Constraints。con19 = sum(ejON) == 1;prob.Constraints。con20 = sum(ejOFF) == 1;gydF4y2Ba
定义变量gydF4y2BaejgydF4y2Ba通过设置以下约束。gydF4y2Ba
cons21 = optimconstr (N);con21 (1) = ej(1) == ejON(1) - ejOFF(1);gydF4y2Ba%方程21gydF4y2Bacon21 (jnot1) = ej(jnot1) ==gydF4y2Ba...gydF4y2Baej(jnot1 - 1) + ejON(jnot1) - ejOFF(jnot1);gydF4y2Ba%方程22gydF4y2Baprob.Constraints。cons21 = cons21;gydF4y2Ba
设置约束条件:罐的数量足够处理,不超过生产能力,并遵守最小生产约束。gydF4y2Ba
prob.Constraints。con23 = y' >= (1/K)*sum(x,1);prob.Constraints。con24 = y <= U*ej;jnotN = 1: (n - 1);prob.Constraints。con25 = y(jnotN) >= T*(ej(jnotN) - ejOFF(jnotN + 1));gydF4y2Ba
对于处置设施,设置允许罐体热功率的约束。gydF4y2Ba
prob.Constraints。con26 = sum(pij.*x,1) <= pmax*y';gydF4y2Ba
指定埋藏筒间距离的非线性约束。函数是分段线性的,用gydF4y2Ba马克斯gydF4y2Ba函数,这是优化表达式不支持的操作。因此,使用gydF4y2Bafcn2optimexprgydF4y2Ba将约束放入gydF4y2Ba概率gydF4y2Ba.gydF4y2Ba
g = @(pmax,dDT)max([-2.26911*dDT + 0.00675*pmax + 54.5288,gydF4y2Ba...gydF4y2Ba-0.05833*dDT + 0.00596*pmax - 0.727083,gydF4y2Ba...gydF4y2Ba-0.14*dDT + 0.17701*pmax - 350.651]);dCA = fcn2optimexpr (@ (pmax dDT) g (pmax, dDT) pmax, dDT);prob.Constraints。con29a = dCA >= dCAlow;prob.Constraints。con29b = dCA <= dCAup;gydF4y2Ba
成本目标gydF4y2Ba
这个多目标问题的第一个目标是成本,它有七个组成部分。gydF4y2Ba
成本= optimexpr (7, 1);gydF4y2Ba
1.组件的存储成本。这个成本是单位时间的成本乘以每个组件的存储时间的总和。gydF4y2Ba
成本(1)= Cas *总和(a * x,gydF4y2Ba“所有”gydF4y2Ba);gydF4y2Ba
2.临时储存费用。这个成本是gydF4y2Baj * ejOFF (j)gydF4y2Ba的一个分量gydF4y2BaejOFFgydF4y2Ba这是gydF4y2Ba1gydF4y2Ba.gydF4y2Ba
成本(2)= Cis *马克斯(ejOFF(1) 1、2 * ejOFF(2) 1、3 * ejOFF(3) 1,…,N * ejOFF (N) 1)gydF4y2Ba.gydF4y2Ba
为了简单地表示这个表达式,表示gydF4y2Ba(2)成本= Cis * ugydF4y2Ba对于一个新的优化变量gydF4y2BaugydF4y2Ba,以及约束gydF4y2Ba
ucons = u >= ((1:N)'.*ejOFF) - 1gydF4y2Ba.gydF4y2Ba
u = optimvar (gydF4y2Ba“u”gydF4y2Ba,下界= 0);成本(2)= Cis * u;ucons = u >= ((1:N)'.*ejOFF) - 1;prob.Constraints.ucons = ucons;gydF4y2Ba
3.汇编存储位置的费用。gydF4y2Ba(3)成本gydF4y2Ba可以表示为gydF4y2BaCsp * v1gydF4y2Ba,在那里gydF4y2Bav1gydF4y2Ba是一个新的优化变量,连同约束gydF4y2Ba
v1 > = (M)和gydF4y2Ba
V1 >= sum_{i=1}^j z(i,j)gydF4y2Ba为每一个gydF4y2Ba1 <= j <= NgydF4y2Ba
v1 >= sum_{i=1}^Z Z (i,j)gydF4y2Ba为每一个gydF4y2Bab <= j <= NgydF4y2Ba.gydF4y2Ba
创造这些成本和相关的约束。gydF4y2Ba
v1 = optimvar (gydF4y2Ba“v1”gydF4y2Ba,下界= 0);(3) = Csp * v1成本;gydF4y2Ba%包括下面给出的三个v1约束。gydF4y2Bav1consa = v1 >= sum(M);bmin1 = 1: (b - 1);v1consb = optimconstr (b - 1);gydF4y2Ba为gydF4y2BaJ =bmin1 v1conb (J) = sum(z(1:a+ J, J)) <= v1;gydF4y2Ba结束gydF4y2Ba字母l = b: N;v1conc = sum(z(:,ell),1) <= v1;prob.Constraints。v1consa = v1consa; prob.Constraints.v1consb = v1consb; prob.Constraints.v1consc = v1consc;
4.罐的成本。这个成本是每个罐的成本乘以被埋的罐的总数量。gydF4y2Ba
(4)成本= Cca * (y)总和;gydF4y2Ba
5.运行封装设施的成本。这个成本是单位时间的成本乘以设备运行的时间长度。gydF4y2Ba
(5)成本= Cef *总和(ej);gydF4y2Ba
6.处理隧道的费用。这是单位长度的成本乘以罐子之间的长度乘以被埋的罐子的总数。gydF4y2Ba
(6)成本= Cdt * dCA *总和(y);gydF4y2Ba
7.中央隧道的费用。这个成本是单位长度的成本乘以中心隧道所需的长度。一个处理隧道可以埋的毒气罐的数量是它的长度gydF4y2Ba问gydF4y2Ba除以罐子之间的距离gydF4y2BadCAgydF4y2Ba.中心隧道的长度与埋在地下的罐的数量成正比gydF4y2Ba总和(y)gydF4y2Ba和成反比gydF4y2BaQ / dCAgydF4y2Ba,与成本成正比gydF4y2Ba有条件现金转移支付gydF4y2Ba.gydF4y2Ba
成本(7)=有条件现金转移支付/ Q * dDT * dCA *总和(y);gydF4y2Ba
总成本是七个成本组成部分的总和。要改变总成本的规模,使之与其他目标的规模相匹配,请取总和的对数。gydF4y2Ba
prob.Objective.cost =日志(总和(成本));gydF4y2Ba
安全目标gydF4y2Ba
这个问题有两个与安全相关的目标。目标2,名叫gydF4y2Basafety1gydF4y2Ba,在所有删除过程中尽量减少最大存储时间。目标3,名叫gydF4y2Basafety2gydF4y2Ba,试图尽早停止处置。使用helper函数定义这两个目标gydF4y2Bamax1gydF4y2Ba而且gydF4y2Bamax2gydF4y2Ba,它们出现在gydF4y2Ba脚本结束gydF4y2Ba.gydF4y2Ba
prob.Objective。safety1=fcn2optimexpr(@max1,A,sij);最小化最大存储时间,目标(2)在[1]中gydF4y2Baprob.Objective。safety2=fcn2optimexpr(@max2,ejOFF);尽早停止处置,目标(5)在[1]gydF4y2Ba
设置选项gydF4y2Ba
在求解过程中设置帕累托图的选项。因为这个问题有超过900个变量,所以将选项设置为使用500的总体大小,这比默认值要大。此外,因为问题包含二进制变量,所以使用gydF4y2BamutationgaussiangydF4y2Ba变异函数。这个变异函数比默认的更好gydF4y2BamutationpowergydF4y2Ba对于二进制变量。gydF4y2Ba
选择= optimoptions (gydF4y2Ba“gamultiobj”gydF4y2BaPlotFcn =gydF4y2Ba“gaplotpareto”gydF4y2BaPopulationSize = 5 e2,gydF4y2Ba...gydF4y2BaMutationFcn = @mutationgaussian);gydF4y2Ba
运行问题gydF4y2Ba
问题的表述已经完成,并且为这个多目标问题设置了选项。运行问题。gydF4y2Ba
rnggydF4y2Ba默认的gydF4y2Ba%的再现性gydF4y2Ba[溶胶,fval exitflag、输出]=解决(概率,选择=选择);gydF4y2Ba
使用gamultiobj解决问题。优化终止:帕累托解扩散的平均变化小于期权。gydF4y2Ba
包含(gydF4y2Ba“成本”gydF4y2Ba) ylabel (gydF4y2Ba“安全第一”gydF4y2Ba) zlabel (gydF4y2Ba“安全2”gydF4y2Ba)gydF4y2Ba
![]()
帕累托图显示了成本和安全1之间的一个明显的权衡。真正的成本是所示数量的指数,所以权衡比所示的要严重得多。gydF4y2Ba
检查解决方案gydF4y2Ba
gamultiobjgydF4y2Ba找到了几个具有不同适应度函数值的可行解。要找到与解相关的控制变量,请使用数据提示。gydF4y2Ba

激活Data Tips后,单击左上角的解决方案。gydF4y2Ba

所选点的索引为1。与这一点相关的变量都在gydF4y2Ba索尔(1)gydF4y2Ba.gydF4y2Ba
检查gydF4y2BaxgydF4y2Ba与此解决方案相关的变量。回想一下,gydF4y2Bax (i, j)gydF4y2Ba移除是及时的吗gydF4y2Ba我gydF4y2Ba可以随时处理gydF4y2BajgydF4y2Ba.gydF4y2Ba
disp (sol(1)方式)gydF4y2Ba
列1到12 0 0 0 0 -0.0000 0 0 0 0 0 0 0 0 0 0 0 0 0.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0.0000 -0.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0.0000 0.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0列13到19 0 0 0 0 228.4792 131.5208 240.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 240.0000 360.0000 360.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 240.0000 354.09775.9023 0000 228.2471 11.7529 0 -0.0000 0000 360.0000 00 0.0000 00 240.0000 0000 360.0000 00gydF4y2Ba
显然,gydF4y2BaxgydF4y2Ba调度不限制为整数值。的和gydF4y2BaxgydF4y2Ba将处置量与清除量进行比较gydF4y2BaM (:)gydF4y2Ba.gydF4y2Ba
disp([总和(sol(1)方式,2),M (:)))gydF4y2Ba
360.0000 360.0000 240.0000 360.0000 360.0000 2400.0000 2400.0000 360.0000 360.0000 2400.0000 2400.0000 360.0000 360.0000 240.0000 2400.0000 360.0000 360.0000gydF4y2Ba
的gydF4y2BaxgydF4y2Ba计划所有删除的帐户。gydF4y2Ba
什么时候封装设备在运行?gydF4y2Ba
disp (sol (1) .ej”)gydF4y2Ba
第1列~ 12列0000 0000 0000 0第13列~ 19列0000 1.000 1.0000gydF4y2Ba
封装运行时间为17和18倍。gydF4y2Ba
处理隧道之间的距离是多少?gydF4y2Ba
disp (sol (1) .dDT)gydF4y2Ba
33.1986gydF4y2Ba
距离大约在25的下限和50的上限之间的一半。gydF4y2Ba
这个时间表的费用是多少?为了找到答案,计算一下gydF4y2Baexp (sol (1) .cost)gydF4y2Ba,因为gydF4y2Ba索尔(1).costgydF4y2Ba是总处理费用的对数。gydF4y2Ba
disp (exp (sol (1) .cost))gydF4y2Ba
2.0943 e + 07gydF4y2Ba
成本约为2100万美元。gydF4y2Ba
检查目标2中帕累托集合中值最低的点。gydF4y2Ba

这个操作点的货币成本要高得多。gydF4y2Ba
disp (exp (sol (5) .cost))gydF4y2Ba
1.2735 e + 08年gydF4y2Ba
货币成本约为1.27亿美元,是之前价值的5倍多。但收获是,目标2是11而不是16,这对应于25年前的垃圾掩埋。越早下葬越安全。gydF4y2Ba
查看gydF4y2BaxgydF4y2Ba对于这个解决方案。gydF4y2Ba
disp (sol(5)方式)gydF4y2Ba
360.0000列1到12 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.0000 - 240.0000 0 0 0 0 0 0 0 0 0 0 0 0.0000 - -0.0000 0 0 0 0 0 0 0 0 0 0 -0.0000 360.0000 0.0000 0 0 0 0 0 0 0 0 0 0 0 227.2852 0 0 0 0 0 0 0 0 0 0 0 0 240.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.0000 0.0000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0列13到19 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 67.2852 132.7148 172.7148 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 360.0000 0000 210.2641 0 29.7359 0000 00 360 0.0000 0000 240 0.0000 0000 360 0.0000 0000gydF4y2Ba
的和gydF4y2BaxgydF4y2Ba将处置量与清除量进行比较gydF4y2BaM (:)gydF4y2Ba.gydF4y2Ba
disp([总和(索尔(5)方式,2),M (:)))gydF4y2Ba
360.0000 360.0000 240.0000 360.0000 360.0000 2400.0000 2400.0000 360.0000 360.0000 2400.0000 2400.0000 360.0000 360.0000 240.0000 2400.0000 360.0000 360.0000gydF4y2Ba
同样,该计划考虑了所有的删除。gydF4y2Ba
什么时候封装设备在运行?gydF4y2Ba
disp (sol (5) .ej”)gydF4y2Ba
第1列至12列00 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 0gydF4y2Ba
封装运行时间为3到18。gydF4y2Ba
这个解决方案的处理隧道之间的距离是多少?gydF4y2Ba
disp (sol (5) .dDT)gydF4y2Ba
50gydF4y2Ba
这次,处理隧道之间的距离尽可能大,50米。gydF4y2Ba
结论gydF4y2Ba
这个例子展示了一个非线性,多目标,混合整数优化问题的公式使用基于问题的方法。帕累托图中的数据提示使您能够分析解决方案。而不是指定gydF4y2BagaplotparetogydF4y2Ba绘图函数,你可以使用gydF4y2BaparetoplotgydF4y2Ba函数从解中得到一个相似的图。gydF4y2Ba
参考文献gydF4y2Ba
[1] Montonen, Outi, Timo Ranta和Marko M. Mäkelä。gydF4y2Ba交互式多目标优化的乏燃料处理进度规划。gydF4y2Ba算法2019年第12卷第12期。可以在gydF4y2Bahttps://www.mdpi.com/1999-4893/12/12/252gydF4y2Ba.gydF4y2Ba
辅助函数gydF4y2Ba
此代码创建gydF4y2Bamax1gydF4y2Bahelper函数。gydF4y2Ba
函数gydF4y2Bav = max1(A,sij) v = round(max(max(A))* sij - 1)));gydF4y2Ba% "round"确保整数值gydF4y2Ba结束gydF4y2Ba
此代码创建gydF4y2Bamax2gydF4y2Bahelper函数。gydF4y2Ba
函数gydF4y2Bav = max2 (ejOFF) v =圆(max ((ejOFF ')。*(1:长度(ejOFF)) - 1));gydF4y2Ba结束gydF4y2Ba
另请参阅gydF4y2Ba
gamultiobjgydF4y2Ba|gydF4y2Ba解决gydF4y2Ba|gydF4y2BaparetoplotgydF4y2Ba|gydF4y2BaparetosearchgydF4y2Ba
相关的话题gydF4y2Ba
您也可以从以下列表中选择网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba