十字路口的交通协商
设计交通信号灯协商决策逻辑模型
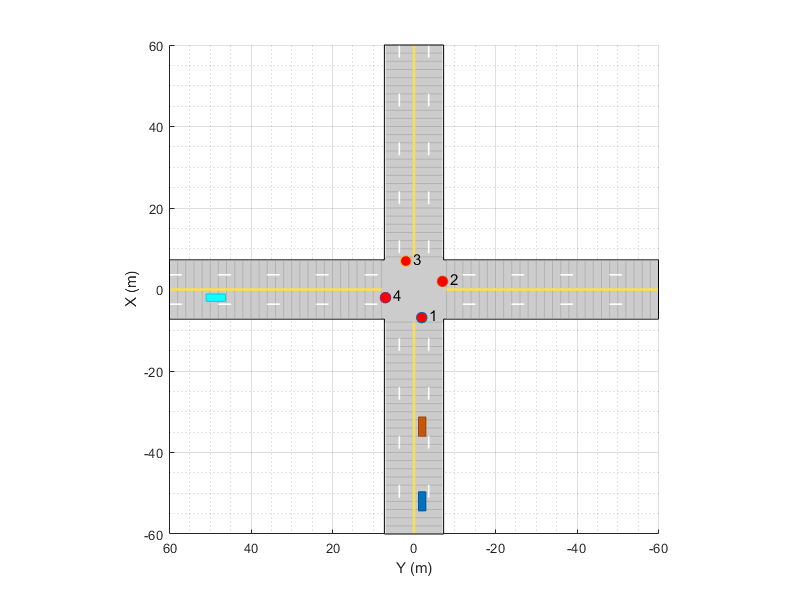
在十字路口穿行是全自动驾驶的挑战之一。为了航行安全,十字路口的车辆通常由交通灯控制。自动驾驶车辆必须具备理解交通信号和这些受管制的十字路口的交通的能力。当车辆驶近有红绿灯监控的十字路口时,它必须能够做出诸如速度控制和停车条件等决策。在这样一个自动化的谈判环境中,你需要一个决策逻辑和控制系统来:
在红绿灯和自我交通工具之间调解。
根据交通信号灯的状态来加速或减速。
这些例子展示了如何设计一个自动协商十字路口交通灯的决策逻辑和控制器模型。
特色的例子


您也可以从以下列表中选择网站: