2自由度PID控制器(PID调谐器)
本例展示了如何利用该方法设计二自由度(2-DOF) PID控制器PID调谐器.该示例还比较了2-DOF控制器与1-DOF PID控制器的性能。
在本例中,您将植物表示为线性时不变模型.有关使用PID调谐器调优PID控制器(2DOF)在Simulink中®模型中,看到二自由度PID控制器设计(Simulink控制设计).
2-DOF PID控制器包括比例和导数项上的设定值加权。与一自由度PID控制器相比,二自由度PID控制器能在不显著增加设定点跟踪超调量的情况下实现更好的抗干扰。使用2自由度PID控制器的典型控制架构如下图所示。

对于本例,首先为给定的设备设计一个1自由度控制器:
G = tf(1,[1 0.5 0.1]);pidTuner (G,“PID”)
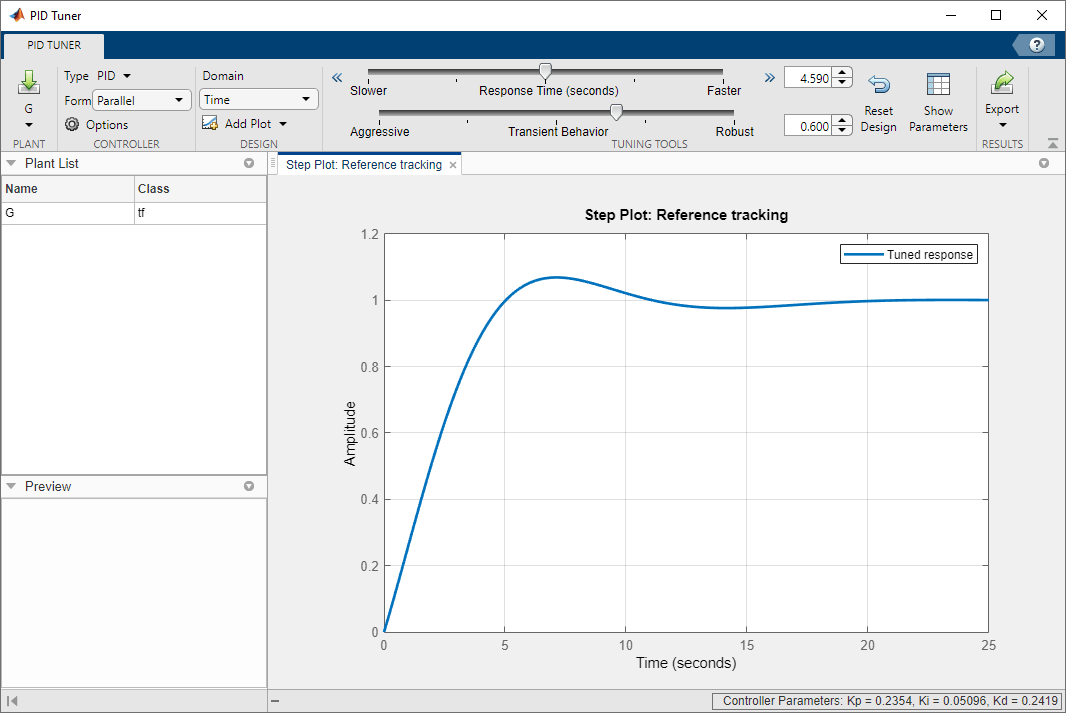
假设在这个示例中,您的应用程序需要比PID调谐器最初的设计。旁边的文本框中响应时间滑块,输入2。

由此产生的响应是快速的,但有相当数量的超调。设计2自由度控制器以改善超调量。首先,将1-DOF控制器设置为基线控制器进行比较。单击出口箭头![]() 并选择
并选择另存为基线.

设计2自由度控制器。在类型菜单中,选择PID2.
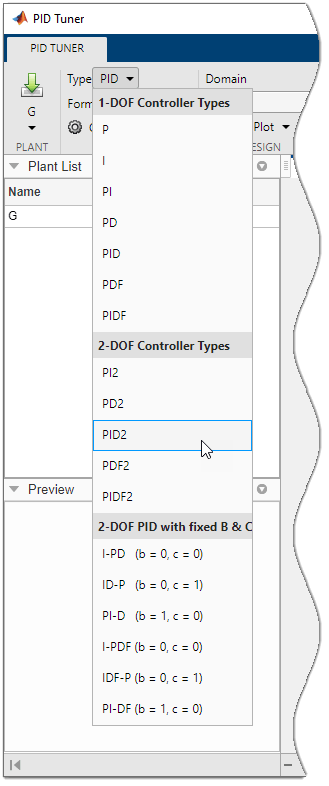
PID调谐器生成具有相同目标响应时间的2自由度控制器。界面右下显示的控制器参数说明如下PID调谐器调优所有控制器系数,包括设定点权重b而且c,以平衡性能和健壮性。比较2-DOF控制器的性能(实线)和作为基线存储的1-DOF控制器的性能(虚线)。
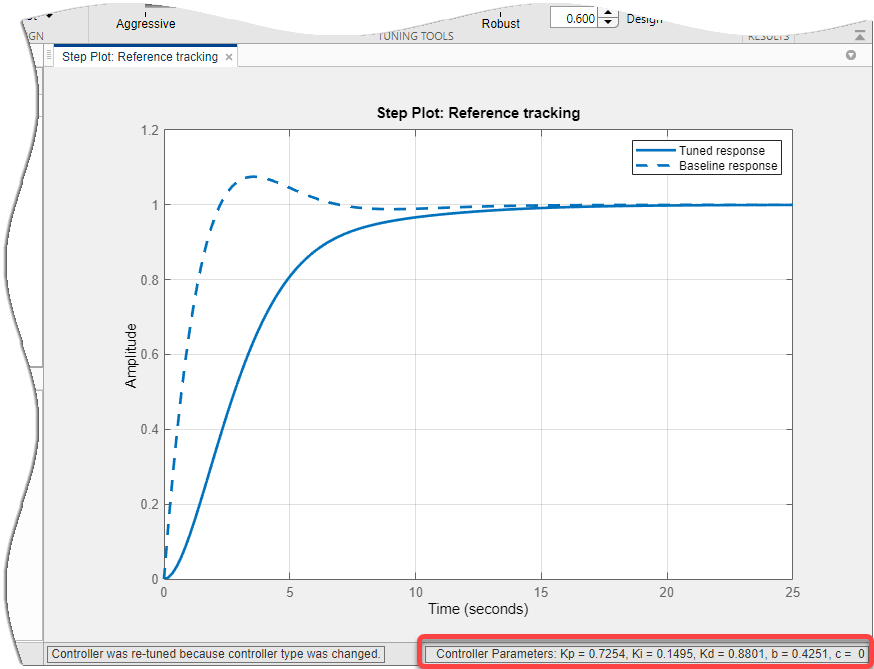
添加第二个自由度消除了参考跟踪响应中的超调。然后,添加阶跃响应图来比较两种控制器的抗扰性能。选择添加图>输入干扰抑制.

你可以在PID调谐器使干扰抑制图与参考跟踪图并列。

两种控制器抗干扰性能一致。因此,使用2自由度控制器消除了参考跟踪超调,而没有任何干扰抑制成本。
您也可以通过更改PID调谐器设计的焦点。首先,单击出口箭头![]() 并选择
并选择另存为基线再次以2自由度控制器为基线进行比较。
改变PID调谐器在不改变响应时间或瞬态行为系数的情况下,设计重点有利于参考跟踪。单击![]() 选项,而在焦点菜单中,选择
选项,而在焦点菜单中,选择输入干扰抑制.

PID调谐器自动调整控制器系数,专注于抗扰性能。
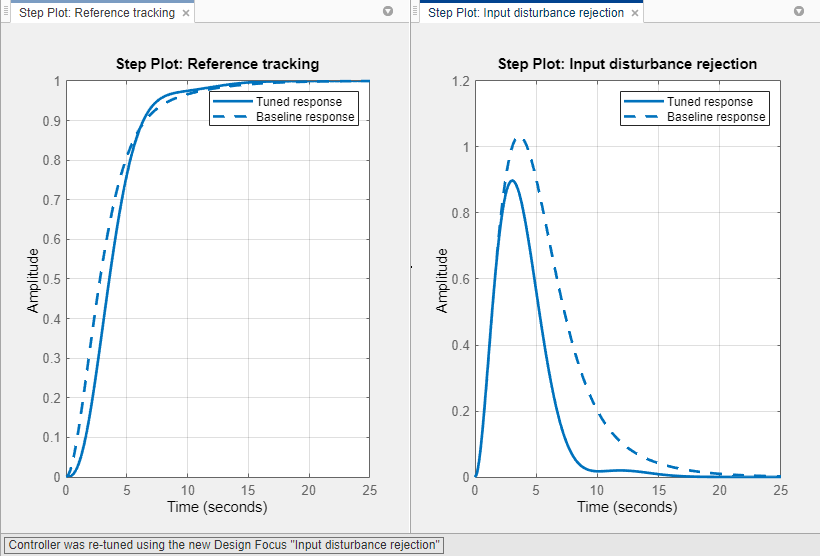
在默认的平衡设计焦点下,PID调谐器选择一个b取值在0到1之间。对于这种植物来说,当你改变设计焦点以适应干扰时,PID调谐器集b= 0和c= 0。因此,PID调谐器自动生成I-PD控制器以优化干扰抑制。(显式指定I-PD控制器而不设置设计焦点将生成一个类似的控制器。)
响应图表明,随着设计焦点的改变,与平衡2自由度控制器相比,抗扰能力进一步提高。这种改进以牺牲一些引用跟踪性能为代价,它略慢。然而,参考跟踪响应仍然没有超调。
因此,使用二自由度控制可以在不牺牲参考跟踪性能的情况下提高扰动抑制能力。这些对系统性能的影响很大程度上取决于设备的特性和控制器的速度。对于某些装置和某些控制带宽,使用2自由度控制或改变设计焦点对调谐结果的影响较小或没有影响。
另请参阅
相关的话题
您也可以从以下列表中选择网站: