机械手的重量感知 发布的坦尼娅Kuruvilla,2022年3月21日 在今天的帖子中,Jose Avendano和我们一起讨论一种专门为机器人操作者开发的感知算法,以确定所抓物体的重量。交给你了,Jose.. 机器人……阅读更多> > 类别: 机器人
兄弟二人分享如何参加学生比赛激发对STEM职业的兴趣 发布的坦尼娅Kuruvilla,2022年3月4日, 今天我们请来了来自艾伦高中的Atiksh Bhardwaj和来自Ereckson中学的Aristaa Bhardwaj,他们参加了BEST Robotics比赛。Atiksh是Ereckson团队的一员,从2016年到……阅读更多> > 类别: MATLAB, 机器人技术, 动态仿真模块
由dj Robocon团队设计的扔箭机器人 发布的坦尼娅Kuruvilla,2021年12月7日 在今天的帖子中,Maitreyee Mordekar想要向你介绍来自印度孟买D. J. Sanghvi工程学院的dj团队Robocon。简介制造一个机器人不是一个简单的…阅读更多> > 类别: 机器人
剑桥计算机科学综合设计项目 发布的Neha高尔,2021年7月9日 作者:Francesco Ciriello博士,来自英国剑桥的教育客户成功工程师。2021年1月至3月间,我指导了剑桥大学的两个学生团队……阅读更多> >
来自VEX-U大赛决赛选手的机器人编程见解 发布的Alexa桑切斯,2020年10月12日 为了本周的博客文章,我们邀请了来自墨西哥阿尔塔米拉技术大学的VEX大学团队,分享他们成为VEX U机器人全国决赛选手的旅程……阅读更多> > 类别: 机器人技术, 仿真软件, Stateflow, 团队的成就
他们现在在哪里?- Kailash Nagarajan,西门子数字工业软件公司 3. 发布的Alexa桑切斯,2020年9月29日, 今天我们请来了西门子数字工业软件公司的Kailash Nagarajan。冈仁波齐在Amrita大学期间(2015 - 2019年)非常积极地参加课外活动,而且……阅读更多> > 类别: 机器人技术, 他们如今身在何方
在Simscape中创建虚拟机器人环境:添加物理、对象交互和自主性 4 发布的Alexa桑切斯,2020年8月31日 本文是关于在Simscape中创建虚拟机器人环境的两篇文章中的第二篇。如果您还没有阅读第1部分,我们鼓励您在这里查看。在前半部分,我们讨论了……阅读更多> > 类别: CAD、 机器人技术, Simscape, 仿真软件, Stateflow
在Simscape中创建虚拟机器人环境:装配机器人并从CAD导入 6 发布的Alexa桑切斯,2020年8月18日 在接下来的两个博客中,Jose Avendano和Matt Schafer合作开发了一个关于如何在机器人设计和编程中使用动态3D模拟的增量教程。我们会教你…阅读更多> > 类别: CAD、 机器人技术, Simscape, 动态仿真模块
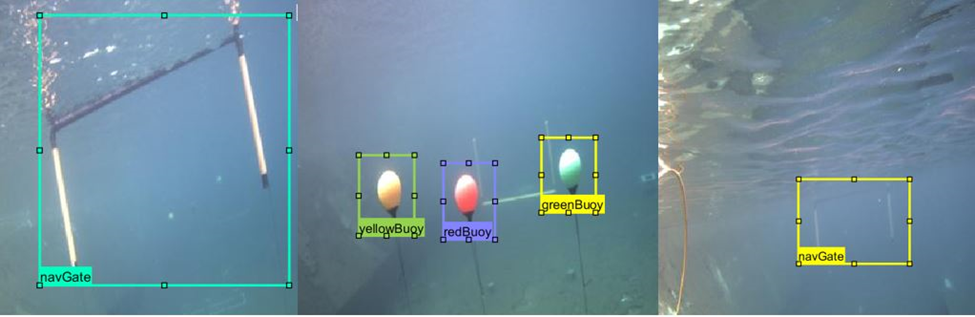
YOLOv2对象检测:将训练有素的神经网络部署到NVIDIA嵌入式gpu 4 发布的Alexa桑切斯,2020年7月22日 在我们之前的博客文章中,我们介绍了如何使用MATLAB标记数据,设计深度神经网络,以及导入第三方预训练的网络。我们训练了一个YOLOv2网络来识别…阅读更多> > 类别: 代码生成, 数据科学、 机器人
YOLOv2对象检测:MATLAB神经网络的数据标记 10 发布的Alexa桑切斯,2020年7月7日 今天在这个博客中,我们将讨论使用深度学习的目标检测的完整工作流程。您将学习数据标记的一步一步的方法,训练YOLOv2神经网络,和…阅读更多> > 类别: 数据科学、 机器人技术, 视频中, 工作流
 克利夫角:克利夫·莫尔谈数学和计算
克利夫角:克利夫·莫尔谈数学和计算 MATLAB的博客
MATLAB的博客 Steve用MATLAB进行图像处理
Steve用MATLAB进行图像处理 人在仿真软件
人在仿真软件 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社世界杯预选赛小组名单区
MATLAB社世界杯预选赛小组名单区 Matlabユザコミュニティ
Matlabユザコミュニティ 初创公司,加速器和企业家
初创公司,加速器和企业家 自治系统
自治系统