机器人与自主系统
开发从感知到运动的自主应用程序,优化系统级行为
机器人和自主系统描述了平台系统,如汽车、飞机、机器人和无人机,它们在物理环境中移动和操作,以实现面向目标的行动。使用多个工具箱中的工具和算法,您可以模拟、估计、导航和控制平台状态,例如其位置和速度,以及监控物理环境。具体来说,你可以:
使用各种坐标系和地图设计、建模和模拟自主系统场景,包括平台、轨迹、路径、传感器和环境。
生成并分类检测,评估平台,并获得环境的各种地图。
针对机器人、无人机和汽车的不同运动特性,采用不同的路径规划算法进行路径规划。
使用多种运动控制算法和策略控制机器人、无人机和汽车。
将软件设计与机器人操作系统(ROS)连接起来,并在硬件上部署您设计的估计、导航和控制算法。
2022世界杯八强谁会赢?机器人和自主系统产品
主题
场景设计与仿真
- 创建简单的RoadRunner场景(走鹃)
使用走鹃场景编辑软件创建一个简单的道路网络。 - 交互式创建驾驶场景并生成合成传感器数据(自动驾驶工具箱)
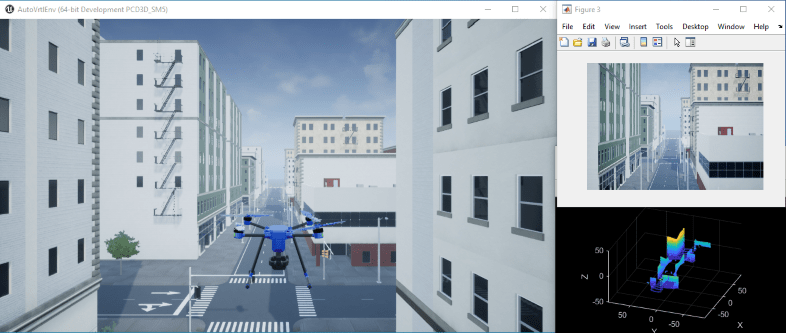
使用驾驶场景设计应用程序创建一个驾驶场景,并从场景中生成传感器检测和点云数据。 - 在虚幻引擎环境中模拟简单的飞行场景和传感器(无人机工具箱)
在模拟环境中可视化传感器,使用Epic Games的虚幻引擎®。 - 控制和模拟多个仓库机器人(机器人系统工具箱)
控制和模拟在仓库设施或配送中心工作的多个机器人。
检测与分类
- 使用激光雷达检测、分类和跟踪车辆(激光雷达工具箱)
通过使用安装在车辆上的激光雷达传感器捕获的激光雷达点云数据来检测、分类和跟踪车辆。 - 利用PointPillars深度学习的激光雷达三维目标检测(激光雷达工具箱)
训练PointPillars网络用于点云中的对象检测。
定位和映射
- 从激光雷达数据构建地图(自动驾驶工具箱)
在惯性测量单元(IMU)读数的帮助下,处理3-D激光雷达传感器数据,逐步构建地图。 - 使用段匹配构建地图和本地化(自动驾驶工具箱)
使用激光雷达数据构建地图,并使用定位车辆在地图上的位置SegMatch,一种基于分段匹配的位置识别算法。 - 三维仿真中无人机导航的立体视觉SLAM(无人机工具箱)
在虚幻引擎环境中使用立体视觉同步定位和映射为城市街区场景生成地图。
态势感知和状态估计
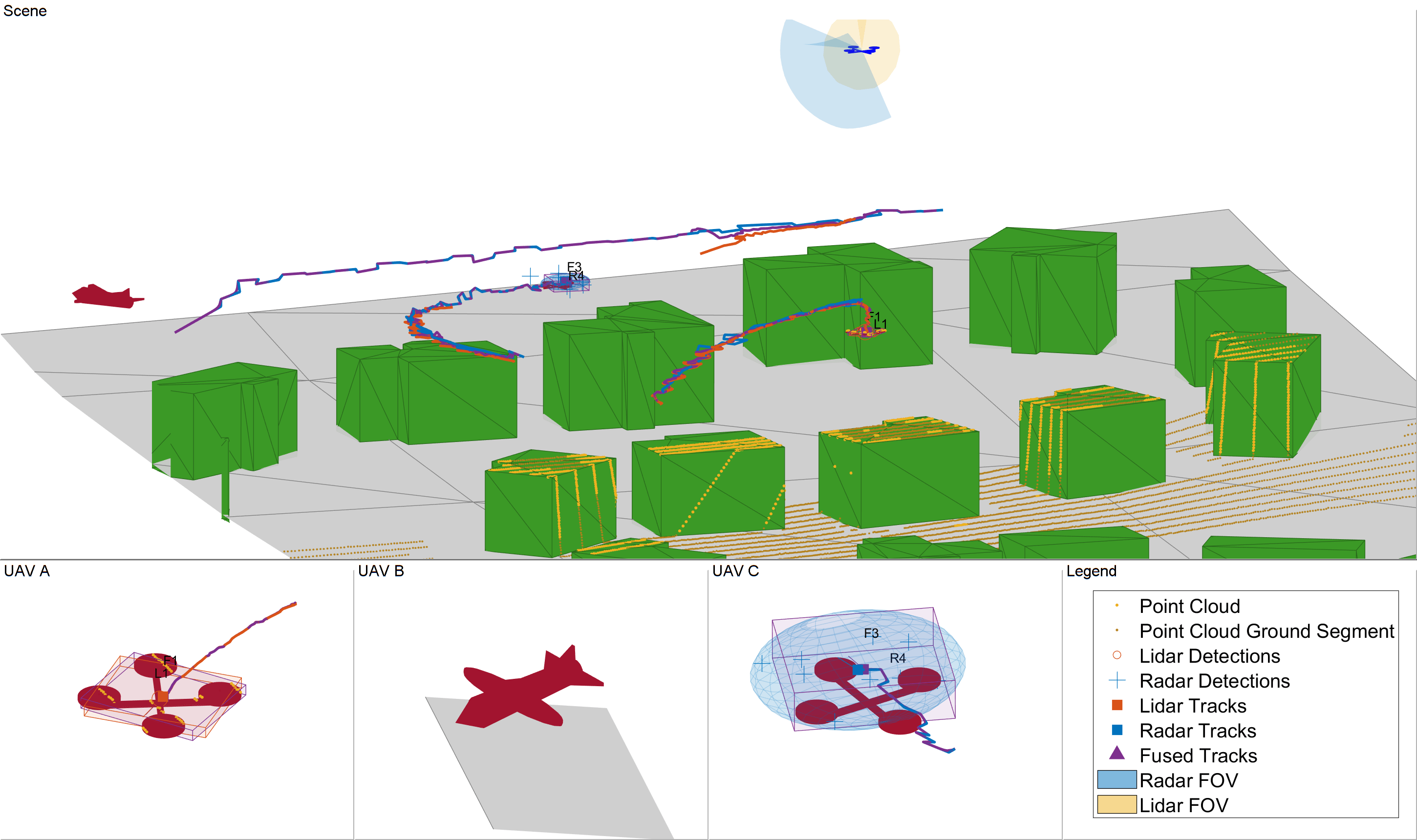
- 基于雷达和摄像头的公路车辆扩展目标跟踪(传感器融合与跟踪工具箱)
跟踪高速公路车辆周围的自我车辆作为扩展对象,跨越多个传感器分辨率单元。 - 使用合成数据的视觉-惯性里程测量(传感器融合与跟踪工具箱)
使用惯性测量单元(IMU)和单目摄像机估计地面车辆的姿态(位置和方向)。
运动规划
- 使用Frenet参考路径的目标跟踪和运动规划(传感器融合与跟踪工具箱)
根据对周围环境的估计,动态地规划自动驾驶汽车的运动。 - 基于RRT的固定翼无人机运动规划(无人机工具箱)
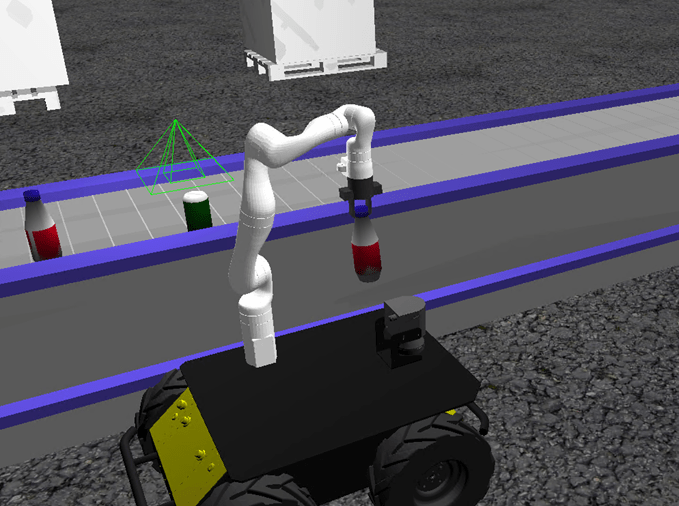
使用快速探索随机树(RRT)算法在三维地图上给出起始和目标姿态,规划固定翼无人机(UAV)的运动。 - 基于点云处理和RRT路径规划的凉亭取放工作流(机器人系统工具箱)
为KINOVA®Gen3等机械臂设置端到端、取放工作流程。
运动控制
- 公路车道跟随RoadRunner场景(自动驾驶工具箱)
中创建的场景模拟高速公路车道跟踪应用程序走鹃3D场景编辑工具。 - 在Simulink®中的路径跟踪与障碍物躲避(导航工具箱)
使用Simulink避免障碍,同时遵循一个差动驱动机器人的路径。 - 控制和模拟多个仓库机器人(机器人系统工具箱)
控制和模拟在仓库设施或配送中心工作的多个机器人。
硬件部署
- 基于惯性传感器融合和MPU-9250的方向估计(传感器融合与跟踪工具箱)
从InvenSense的MPU-9250 IMU传感器获取数据,利用传感器数据中的6轴和9轴融合算法计算设备的方位。 - 带ROS的符号跟随机器人的MATLAB(ROS工具箱)
使用MATLAB®控制在ROS网络上运行的基于ROS的单独模拟器上的模拟机器人。 - 使用蒙特卡洛定位算法对龟机器人进行定位(导航工具箱)
应用蒙特卡罗定位算法在TurtleBot®机器人在模拟Gazebo®环境。
特色的例子

您也可以从以下列表中选择一个网站: