机器人教育
学习如何使用MATLAB和Simulink平台,如VEX机器人,乐高和其他教育机器人套件。MathWorks专家为初学者分享机器人的基本概念知识。
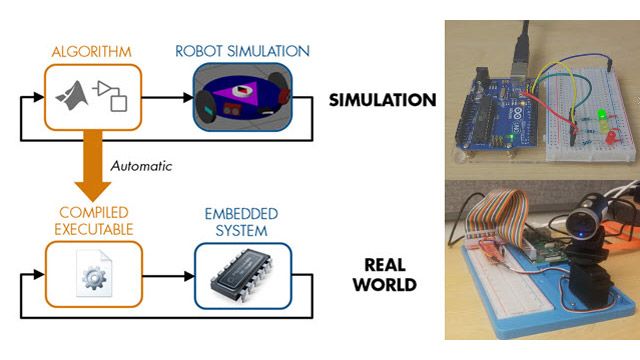
用MATLAB和Simulink学习机器人学习如何使用MATLAB和Simulink为小学和中学教授机器人,使用仿真和低成本的教育硬件。

安装MATLAB和Simulink的硬件支持包使用MATLAB中的Add-On Explorer安装硬件支持包。
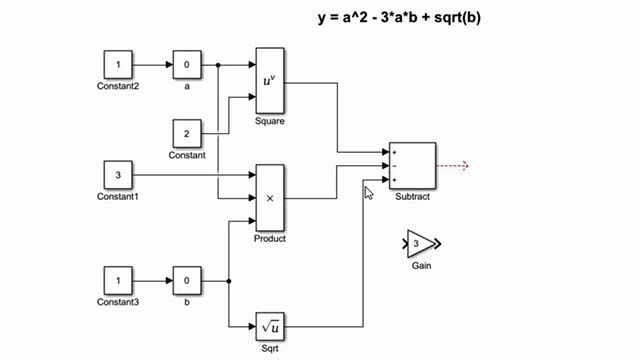
Simulink学生竞赛团队快速入门学习如何在Simulink中创建代数方程的模型。
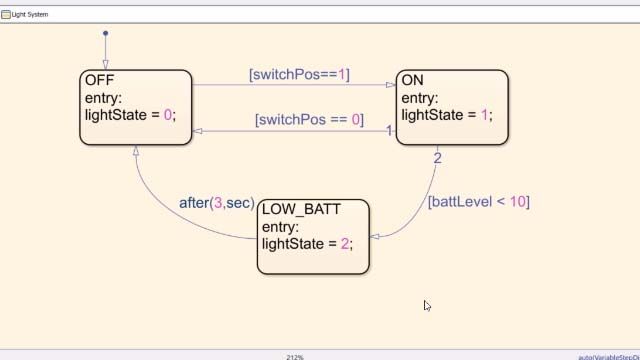
学生竞赛团队的状态流快速开始了解基本的状态流术语和功能,以及设计和模拟简单状态图的工作流。

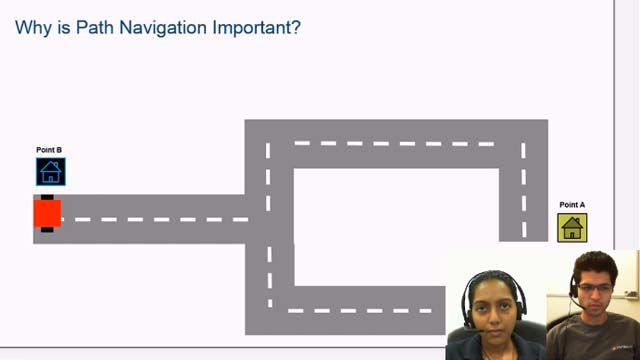
学习用Simulink编程乐高机器人学习如何使用Simulink编程乐高机器人完成任务,如航迹推算,线跟随,障碍物回避,和路径导航。
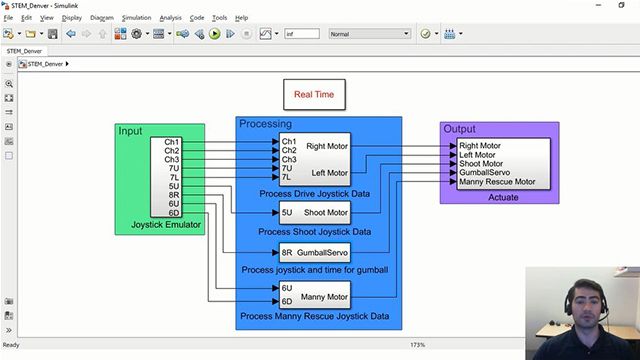
用Simulink编程VEX ARM-Cortex发现使用Simulink和VEX Cortex微控制器库的好处。
基于VEX编码器和Simulink的机器人导航通过使用ARM Cortex-based VEX支持包中的集成电机编码器块,与机器人执行预定义的路径导航任务,如航位推算。

基于Simulink的VEX机器人障碍物检测使用ARM Cortex-based VEX支持包中的超声波传感器块与机器人执行障碍物检测任务。
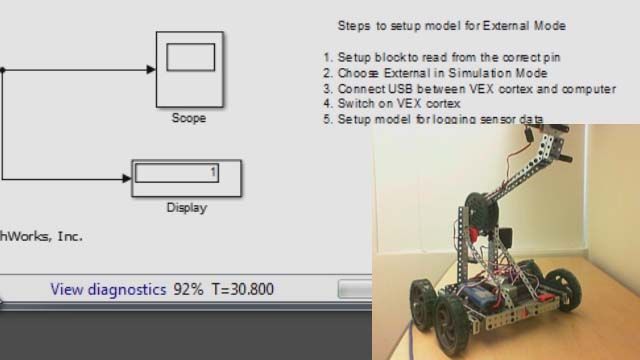
使用外部模式的VEX Simulink模型调试学习使用Simulink外部模式与VEX Cortex微控制器通过串行USB连接获取和记录传感器数据。
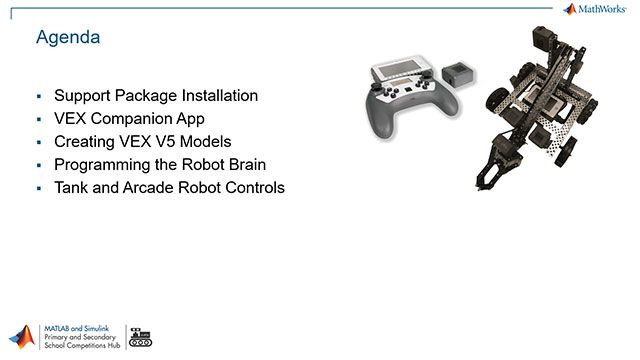
开始使用Simulink和VEX EDR V5开始使用Simulink编程VEX EDR V5机器人大脑,并学习如何编程街机和坦克机器人控制。
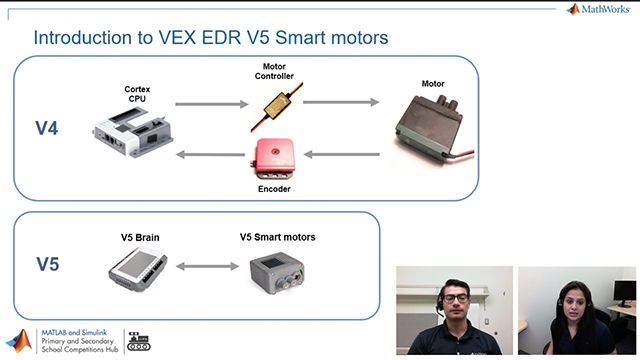
用Simulink编程VEX EDR V5智能电机通过一系列Simulink演示,了解VEX V5智能电机可用的不同编程方法。
使用虚拟世界模拟移动机器人通过利用预先构建的虚拟环境来开发和测试机器人算法,开始使用Simulink来编程移动机器人。
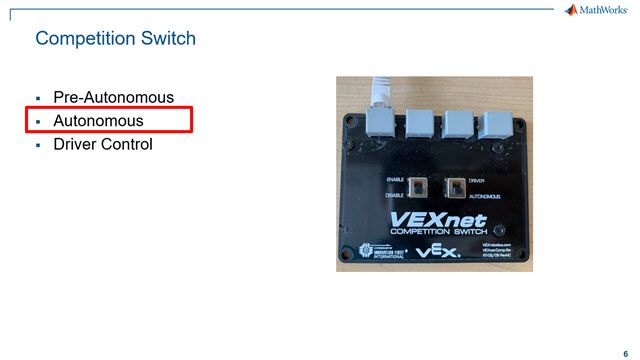
VEX机器人驱动与自主控制的切换程序自主和驾驶员控制模式,由VEX机器人竞赛开关或使用MATLAB和Simulink的手柄触发。
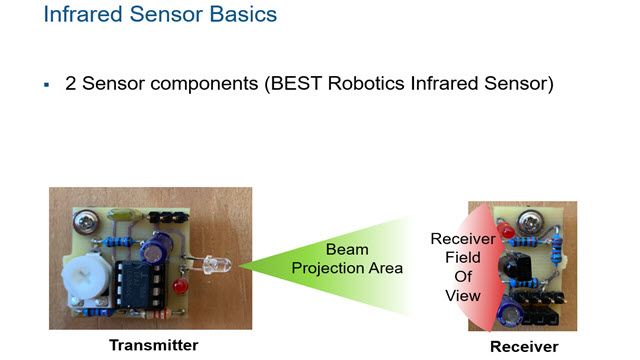
利用红外传感器实现机器人导航学习如何编程机器人,使用红外传感器通过探测障碍物,跟踪线和推导旅行的距离来导航环境。
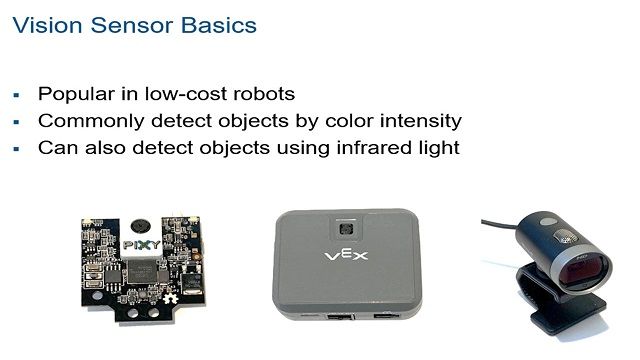
视觉传感器在机器人自主中的应用学习如何编程视觉传感器集成到机器人自治算法,如对象跟踪和自动对象抓取。
最佳Simulink设计奖2017了解优秀学生团队如何使用Simulink来获得竞争优势,在为2017年BEST机器人大赛的机器人编程时。
您也可以从以下列表中选择网站: