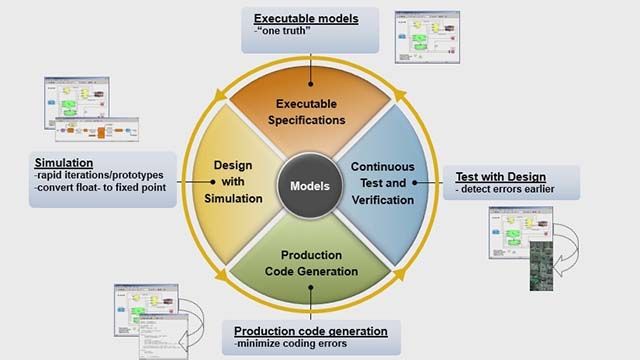
在本视频中,我们将在嵌入式微控制器上实现面向场的控制算法。我们将旋转这个无刷PMSM电机,我们将使用德州仪器发射台处理器和DRV8305逆变器模块控制。我们将使用与进行模拟时相同的模型。在右边,我们可以看到模型中不同的抽样率。电流环的运行速度是50微秒,速度环的运行速度是50微秒的十倍。然后我们还有串行接收子系统,它从运行在10hz的主机模型中获取数据。现在,我们将转到硬件选项卡并单击设置。我们可以看到,我们已经配置了模型来为Texas Instruments F28379D处理器生成代码,并且我们正在使用Embedded Coder来生成代码。
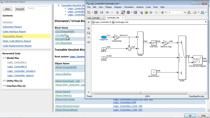
如果我们查看当前的控制子系统,我们看到这个模型包含了来自电机控制块集的算法块,如Park和Clarke块,以及来自C2000支持包的驱动块。当我们从这个模型生成代码时,Embedded Coder会生成算法和驱动程序代码。然后自动编译所有代码,并将目标应用程序下载到处理器。让我们通过按“构建、部署和开始”按钮来实现这一点。这将启动代码生成过程。我们可以在诊断查看器中看到进展。我们看到代码正在生成,并且在code Composer Studio IDE中自动创建了一个项目。通过单击这里,我们可以打开项目并从IDE进行调试。我们现在可以看到,应用程序已经下载到目标,我们已经准备好旋转我们的马达。
现在我们已经为微控制器编写了程序,让我们打开运行在我的笔记本电脑上的主机模型。这个模型让我们可以使用这个旋钮为电机轴设置所需的速度,其中我们指定转速参考rpm。通过这个开/关开关,我们还可以指定电机应该开始旋转的时间。模型通过串口从目标应用程序接收这里列出的速度和电流等信号,我们在此范围内绘制每个单元的规范化值。要在主机上开始执行,我们转到模拟选项卡并按下run。我们可以在右边的范围内看到测量值。我们把开关打开,让马达转动起来。我们看到电机的速度如何开始跟踪参考。让我们试着将参考速度设置为一组不同的值,并观察电机的响应。我们提高到0.8的电机基线速度。 And now let’s try a step change from 0.8 of the baseline speed to a much lower speed value. And here’s another step change to higher speed. After checking the performance of speed tracking, let’s look at the currents. From this menu, we choose Id current. To better see the current waveform, let’s open scope settings and change the time span to 0.1 second. We see that Id current is kept at zero. Next, let’s look at Iq. Finally, we can take a look at the phase-A and phase-B电流。
在本视频中,我们展示了如何使用电机控制块集和嵌入式编码器在目标微控制器上以20khz运行并控制无刷PMSM电机上生成代码。演示到此结束。