在Simulink的Cube Orange Autopilot上部署
可以将Simulink生成的代码部署到立方体橙色使用无人机工具箱支持PX4自动驾驶仪的自动驾驶仪。
本主题解释如何使用立方体橙与无人机工具箱支持包px4autopilot。
在开始使用Simulink之前,请确保您安装了最新的稳定版本QGroundControl并且能够从QGroundControl上传PX4固件的最新稳定版本.如果遇到USB连接问题,建议安装任务计划并按照中所述重新安装最新的驱动程序这个页面.
成功从QGroundControl上传PX4固件后,开始使用无人机工具箱支持包px4autopilot。
选择自定义PX4自动驾驶仪硬件设置
如果已经安装了支持包,则通过打开Add-On管理器来启动硬件设置。

在外接程序管理器中,通过单击设置按钮,
 .
.启动后,“硬件设置”窗口提供了配置支持包以使其与硬件一起工作的说明。
在选择一个PX4自动驾驶仪和构建目标屏幕上,选择
我的董事会没有列在这里.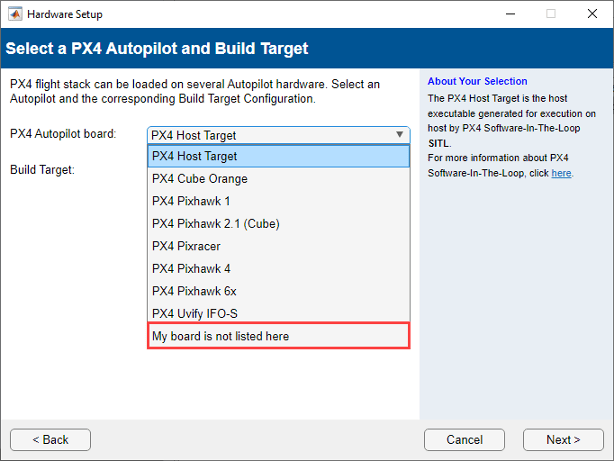
浏览到相应的CMake构建目标(
cubepilot_cubeorange_default)在你的PX4固件构建。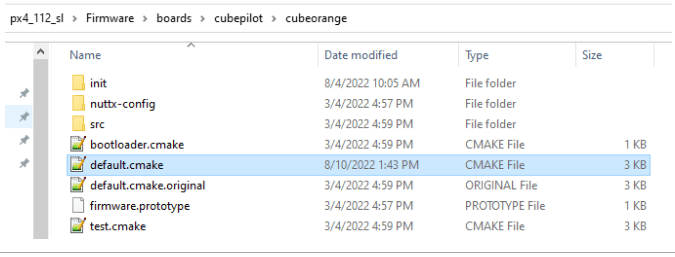

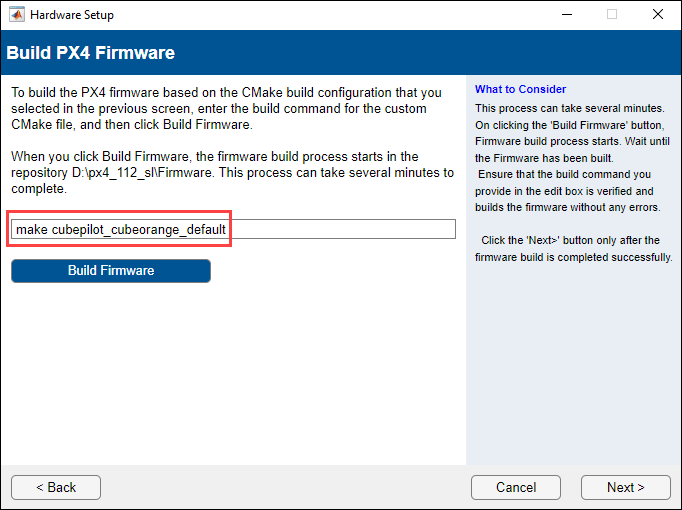
验证正确的make命令,为Cube Orange 构建固件,然后单击构建固件.
对于Cube Orange,引导加载程序COM端口和主要通信COM端口是不同的。由于这个问题,您可能无法完成硬件设置中的测试连接步骤。您可以跳过此步骤。





选择PX4 Pixhawk系列作为Simulink目标硬件
硬件设置完成后,为选定的构建目标成功构建PX4固件,您可以通过在Simulink模型配置设置中选择PX4 Pixhawk Series作为硬件板,在Simulink中使用Cube Orange自动驾驶仪。

在硬件设置中选择的CMake构建目标会自动出现在CMake配置中。

在 Simulink中设置“上传和通信”的“COM端口”
部分Cube Orange单板用于上传固件的bootloader COM Port和主通信COM Port不一致。 当您连接到这样的电路板时,引导加载程序端口首先出现在设备管理器中。端口显示几秒钟,然后主通信端口出现。bootloader COM端口用于固件上传,通信端口用于MAVLink通信或Monitor和Tune模拟。
例如,下面是连接Cube Orange时设备管理器窗口的快照。连接后,一个名为ProfiCNC Cube (COM13)的COM端口出现在端口下面。这是固件上传所需的引导加载程序端口。该端口停留一段时间后,单板加载主固件,主通信端口Cube Orange PX4(COM14)启动。因此,在该单板上,COM13是引导加载端口,COM14是通信端口。

确保您为固件上传和MAVLink通信指定了正确的COM端口。如果为固件上传指定通信COM端口值而不是引导加载器COM端口值,则无法上传固件。在不同的仿真模式下,需要在Simulink模型中正确设置Pixhawk单板的上传端口和通信端口。
设置“固件上传和部署”的“Bootloader COM Port”
对于Simulink模型,启动模型设置.

这里显示了硬件实现的默认设置的示例图像。

输入引导加载程序串口用于上传固件的串口(这应该是引导加载程序端口)。

部署Simulink模型。在硬件选项卡,在模式部分中,选择在船上跑然后点击构建、部署和启动.


设置监控和调优的通信COM端口(外部模式)
执行主题中所示的“生成”选项的设置设置“固件上传和部署”的“Bootloader COM Port”.
在外部模式选项卡,清除外部模式使用与固件上传相同的主机串口选项和提到的主要通信端口主机串口(这必须与前面提到的引导加载程序端口不同构建选项).

在外部模式下运行模型。
PIL设置“通信COM Port”
执行主题中所示的“生成”选项的设置设置“固件上传和部署”的“Bootloader COM Port”.
在公益诉讼选项卡,清除PIL使用与固件上传相同的主机串口选项和提到的主要通信端口主机串口(这必须与前面提到的引导加载程序端口不同构建选项).


限制
PX4 Pixhawk系列单板不支持连接I/O模拟。
Cube Orange不支持PX4 CAN块。
在PX4 HITL模拟中使用jMAVSim例子, jMAVSim不会从Simulink自动启动。手动启动jMAVSim模拟器,
导航到PC中已安装的Cygwin Toolchain目录。
启动批处理文件
run-console.bat.这将打开Cygwin控制台。将下载的PX4固件所在目录更改为“Firmware”文件夹,执行如下命令。提供通信COM端口作为参数。
./Tools/jmavsim_run.sh -q -s -d COM13 -b 921600 -r 250 .使用实例
在SD卡上的mat文件记录例子,提供通信COM端口作为输入参数getMATFilesFromPixhawk函数。COM口自动检测不支持立方体橙色。
getMATFilesFromPixhawk(“px4demo_log”、“DeleteAfterRetrieval”,的确,“相称”,“COM13”)
您也可以从以下列表中选择一个网站: