车辆网络工具箱能输入/输出吗
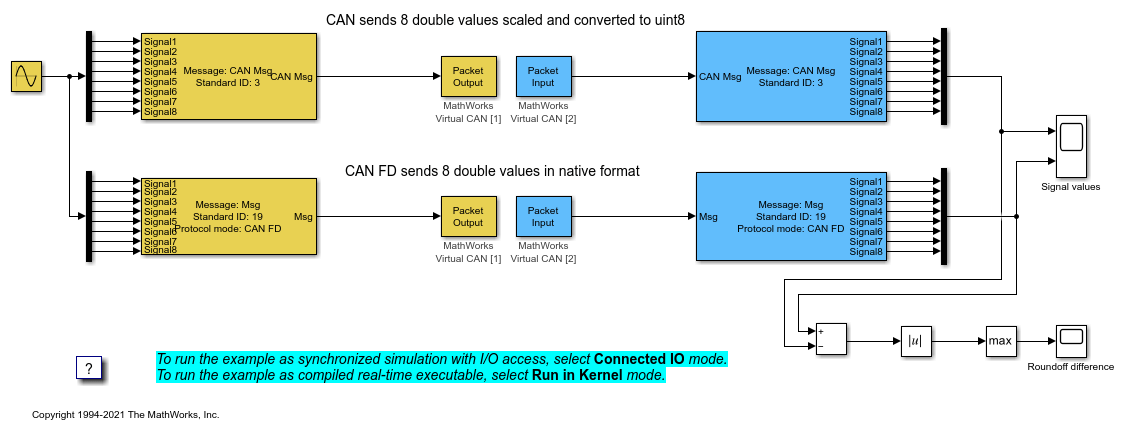
这个例子展示了如何通过CAN总线传输数据,利用CAN_MESSAGE数据类型以及车辆网络工具箱™块库中可用的CAN Pack和CAN Unpack块。CAN_MESSAGE数据类型可以由Simulink®Desktop Real-Time™块直接处理。
该示例还显示了CAN和CAN FD协议之间的数据传输能力的差异。CAN协议的最大数据大小是8字节。这个协议能够发送8个双精度值,这些值需要缩放并转换为uint8数据类型,损失一些精度。CAN FD协议的最大数据大小是64字节。该协议能够以它们的本机格式传输8个双精度值,而没有任何转换和精度损失。
模型在一台计算机内从一个虚拟CAN通道发送数据到另一个虚拟CAN通道。在双通道CAN设备上,两个CAN通道既可以是虚拟通道,也可以是物理通道。您可以修改模型以在两台计算机之间进行通信,方法是将模型分成发送和接收部分,并在两台计算机上运行模型。
黄色块用于发送数据。蓝色块用于接收数据。
注意:此模型仅在Microsoft®Windows®上运行。
在连接IO模式下运行Model
切换到连接输入输出模式,如果需要,在桌面实时选项卡上,选择模式>连接输入输出.
单击,启动实时执行在实时运行.
在内核模式下运行模型
切换到运行在内核模式,如果需要,在桌面实时选项卡上,选择模式>运行在内核.
单击,启动实时执行实时运行.
模型构建,连接到Simulink中运行在内核模式,并开始。
打开模型
这些命令打开模型并抑制关于未安装板的警告。
w =警告(“关闭”,“sldrt: blkgui: boardnotonlist”);open_system (fullfile (matlabroot,“工具箱”,“sldrt”,“sldrtexamples”,“sldrtex_canmessage”));警告(w);


关闭开放的范围
close_system (find_system (gcs,“BlockType”,“范围”));
清理模型
清晰的关闭所有bdclose所有
另请参阅
您也可以从以下列表中选择网站: