使用离合器接合和分离齿轮
这个例子显示一个齿轮被啮合,然后脱离,由一个自定义离合器。扭矩和运动在有限的时间间隔内从一个轴传递到另一个轴。
传动系统设计中的一个常见任务是在不同的固定传动比下传递运动和扭矩。传动系统通常被设计成在一组不同的齿轮传动比之间切换。实现从一种传动比到另一种传动比的切换需要逐步分离一组传动系联轴器并接合另一组。离合器允许你啮合和分离传动轴从另一个逐渐。的盘式摩擦离合器块代表一个标准的表面摩擦为基础的离合器,模型这一行为。
本例中的模型使用了一个自定义离合器子系统,其中包含一个基础摩擦离合器块。的基础摩擦离合器块要求你指定静态和动态离合器摩擦力比盘式摩擦离合器块需要,因为它模型离合器更详细。另请参阅模型摩擦离合器在基本水平.
请注意
你可以模拟连续的运动-转矩传递变矩器块,它模拟流体粘度,而不是表面摩擦,不锁定。
模拟齿轮接合和脱离
打开模型。在MATLAB中®命令提示符,输入
sdl_clutch_custom
自定义离合器模型与程序离合器压力
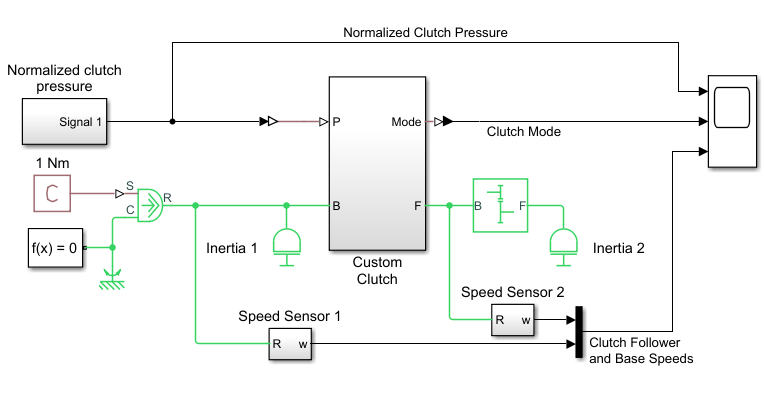
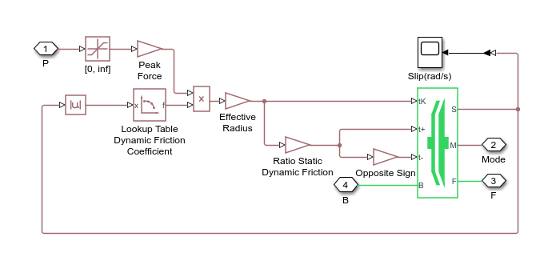
自定义离合器子系统
模型组件
离合器子系统位于惯性1和简单齿轮块之间,并报告离合器模式(前进,倒车,锁定)。
的PS常数块代替正弦信号作为转矩输入。扭矩传感器块省略了。
Simulink-PS转换器而且PS-Simulink转换器模块在Simscape™环境中的物理信号和Simulink之间进行通信®块,例如范围块。
的
归一化离合器压力块提供程序离合器压力信号,归一化在0到1之间,如下表所示。这个信号被转换为离合器子系统内部的物理压力。时间范围(秒) 信号值 0 - 2 0 2 - 4 0-0.8,斜率恒定 4 - 6 0.8 6 - 7 0.8-0,斜率恒定 7 - 10 0
打开scope并开始模拟。归一化离合器压力信号遵循您在signal Builder中创建的配置文件,并决定模型的行为。
从0到2秒,惯量1的速度线性增加,因为它受到恒定的转矩。
2秒后,离合器开始接合,惯性2开始旋转。惯性1的速度继续上升,尽管速度较慢,因为两个惯量现在共享外部力矩。
4秒时,压力达到最大值。大约在5.32秒时,离合器锁定。由离合器连接的传动轴现在一起旋转。惯量1和惯量2在恒定加速度下继续加速,惯量2的速度是惯量1的一半。
在6秒时,离合器开始脱离压力下降。惯量1和惯量2随着施加的力矩继续加速。
离合器开合约6.73秒,完全脱离7秒。(离合器在完全脱离之前会打开一点,因为即使在消失之前,压力也会变得太小,无法保持锁紧。)惯性1仍然在加速。但惯性2现在摆脱了传动轴和它的扭矩,不再加速,而是以恒定的速度旋转,没有摩擦损失。
当两个轴被锁定,从5.32-6.73秒,惯性1和惯性2以固定的2:1的比例旋转,因为简单齿轮。
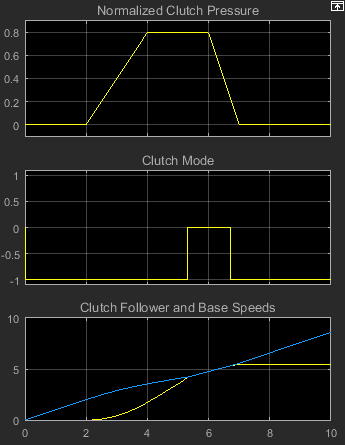



离合器模式如何指示锁定和解锁
离合器模式信号表示其两个连接轴的相对运动。从0秒到5.32秒,两个轴相对移动。从动轴(从动轴)比基轴(驱动轴)慢,因此模式信号为-1。一旦两个轴锁定,它们的相对速度为0,模式信号切换为0。在6.73秒时,他们解锁,驱动(基)轴开始加速比从动(从动)轴更快。模式信号切换回-1。
您也可以从以下列表中选择网站: