基于FMCW和MFSK技术的汽车自适应巡航控制
这个例子展示了如何在Simulink®中建模一个汽车雷达,其中包括自适应巡航控制(ACC),这是一个先进的驾驶辅助系统(ADAS)的一个重要功能。该示例探讨了单个目标和多个目标的场景。它展示了如何处理调频连续波(FMCW)和多频移键控(MFSK)波形来估计周围车辆的距离和速度。
可用的示例实现
这个例子包括四个Simulink模型:
FMCW雷达距离估计:slexFMCWExample.slx
多目标FMCW雷达距离和速度估计:slexFMCWMultiTargetsExample.slx
多目标MFSK雷达距离和速度估计:slexMFSKMultiTargetsExample.slx
多目标FMCW雷达距离、速度和角度估计:slexFMCWMultiTargetsDOAExample.slx
雷达距离估计
下面的模型展示了一个端到端FMCW雷达系统。系统设置类似于MATLAB®基于FMCW技术的汽车自适应巡航控制的例子。该模型与上述示例之间的唯一区别是,该模型具有围绕载波频率对称的FMCW波形扫描。
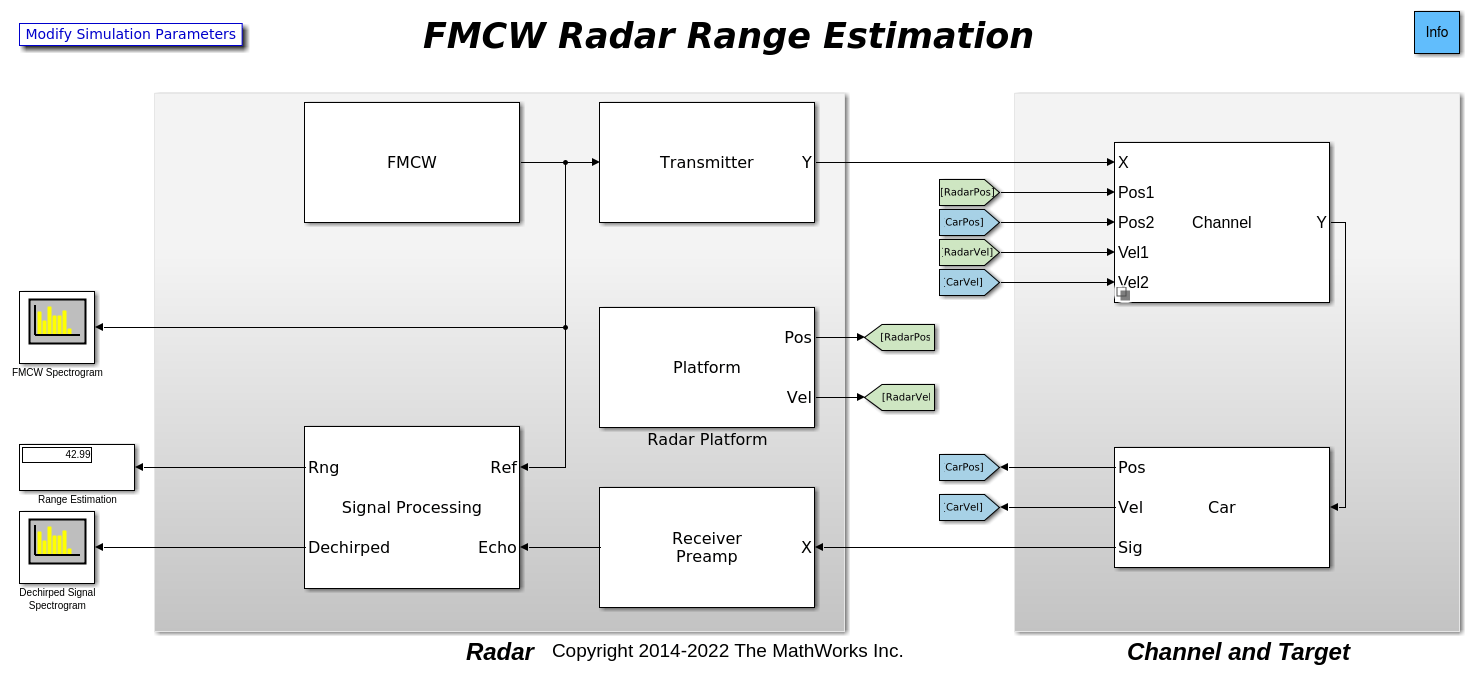
图中显示了模型中的信号流。组成模型的Simulink块分为两个主要部分雷达部分和渠道和目标部分。左边的阴影块代表雷达系统。在本节中,FMCW信号的产生和传输。该部分还包括捕获雷达回波并执行一系列操作的接收器,如解调和脉冲积分,以估计目标距离。右边的阴影块模拟了信号在空间中的传播及其在汽车上的反射。系统的输出,以米为单位的估计范围显示在左边的显示块中。
雷达
雷达系统由安装在沿直线道路行驶的车辆上的发射机和接收机组成。它包含从返回的目标回波中提取信息所需的信号处理组件。
FMCW—创建FMCW信号。FMCW波形是汽车雷达的常用选择,因为它提供了一种使用连续波(CW)雷达估计距离的方法。距离与发射信号与接收回波之间的频率偏移成正比。信号扫频为150兆赫。发射机—发送波形。发射机的工作频率是77 GHz。接收机前置放大器—接收目标回波,并添加接收端噪声。雷达平台-模拟雷达车辆轨迹。信号处理—处理接收到的信号,并估计目标车辆的距离。
在雷达时,目标回波经过几个信号处理步骤才能估计出目标距离。信号处理子系统由两个高级处理阶段组成。
第1阶段:第1阶段通过将接收信号与发射信号相乘对接收信号进行解码。该操作在目标回波和传输信号之间产生一个拍频。目标距离与拍频成正比。该操作还减少了处理信号所需的带宽。接下来,64次扫描被缓冲以形成一个数据立方。数据管的维度是快时间和慢时间。然后将该数据集传递给
矩阵和块,其中慢时间样本被集成以提高信噪比。然后将数据传递给响应范围块,它执行FFT操作将拍频率转换为范围。雷达信号处理非常适合并行化,因此在进一步处理之前,雷达数据在范围内被划分为5部分。第二阶段:第二阶段由5个并行处理链组成,用于检测和估计目标。

在第二阶段,每个检测与估计链块由3个处理步骤组成。
检测处理:雷达数据首先传递到一维单元平均(CA)恒定虚警率(CFAR)探测器,该探测器在距离维度上工作。此块标识检测或命中。
检测聚类:然后将检测传递到下一个步骤,在该步骤中使用基于密度的空间聚类的应用程序和噪声算法将它们聚合为集群
DBSCAN Clusterer运算块。类所识别的检测,聚类块将范围内的检测聚类CA CFAR块。参数估计:在检测和集群被识别之后,最后一步是
区间估计块。这一步估计雷达数据中探测到的目标的范围。

渠道和目标
的渠道和目标该模型的一部分用于模拟信号在目标车辆上的传播和反射。
通道—模拟雷达车辆与目标车辆之间的信号传播。该通道可以设置为视距自由空间通道或双射线通道,其中信号通过直接路径和离地反射路径同时到达接收器。默认选择是空闲空间通道。

车-反射入射信号,模拟目标车辆轨迹。该子系统如下图所示,由两个部分组成:模拟回波的目标模型和模拟目标车辆动力学的平台模型。

在Car子系统中,目标车辆被建模为具有指定雷达横截面的点目标。雷达横截面用于测量从目标反射的功率。
在这个模型的场景中,雷达车从原点出发,以100公里/小时(27.8米/秒)的速度前进,而目标车从雷达车前面43米的地方出发,以96公里/小时(26.7米/秒)的速度前进。在传播信道中使用雷达和目标车辆的位置和速度来计算延迟、多普勒和信号损失。
模式探索
通过辅助函数计算模型的几个对话框参数helperslexFMCWParam.要从模型中打开函数,请单击修改仿真参数块。该函数在加载模型时执行一次。它向工作区导出一个结构,该结构的字段由对话框引用。要修改任何参数,可以在命令提示符更改结构中的值,或者编辑helper函数并重新运行它以更新参数结构。
结果和显示
下面FMCW信号的谱图显示,信号大约每7微秒线性扫过150mhz的跨度。该波形提供了大约1米的分辨率。

解码信号的频谱如下图所示。该图表明,目标所引入的拍频约为100 kHz。注意,脱hirp后,信号只有一个单一的频率成分。从这个拍频计算出的距离估计结果,如上面的整体模型所示,完全在1米的距离分辨率内。

然而,这一结果是在自由空间传播通道下得到的。在现实中,车辆之间的传播通常涉及发射器和接收器之间的多条路径。因此,来自不同路径的信号可能在接收端产生建设性或破坏性的增加。下一节将传播设置为双射线通道,这是最简单的多路径通道。

运行仿真,观察脱hirded信号的频谱。

注意不再有一个主要的节拍频率,因为在这个范围内,来自直接路径和反射路径的信号会破坏性地结合,从而相互抵消。这也可以从估计的范围看出,它不再符合地面事实。
多目标FMCW雷达距离和速度估计
下面的示例模型显示了一个类似的端到端FMCW雷达系统,模拟2个目标。这个例子估计了探测到的目标的范围和速度。

该模型本质上与前面的示例相同,但有4个主要区别。这个模型:
包含两个目标,
使用距离-多普勒联合处理,这发生在
Range-Doppler响应块,只处理范围内数据的一个子集,而不是多个链中的整个数据集,并且
使用二维CA CFAR进行检测。
雷达
该模型在信号处理子系统中采用距离-多普勒联合处理。在距离-多普勒域的联合处理使估计多普勒跨越多次扫描成为可能,然后使用该信息来解决距离-多普勒耦合,从而获得更好的距离估计。
信号处理子系统如下图所示。

组成信号处理子系统的各个阶段与前面的示例类似。每个阶段执行以下操作。
第1阶段:第1阶段再次执行64扫数据管的脱孔和组装。然后将数据集传递给
Range-Doppler响应块计算输入信号的距离多普勒图。然后将数据集传递给范围的子集块,它获取将要进行进一步处理的数据集的子集。阶段2:第二个阶段是进行检测处理的阶段。本例中的检测器是
Ca cfar 2-d在距离和多普勒维度上都能工作的块。阶段3:集群发生在
DBSCAN Clusterer运算同时使用距离和多普勒维度。控件显示聚类结果情节集群块。第四阶段:根据距离多普勒图估计目标的距离和速度
区间估计而且多普勒估计量块,分别。
正如在示例的开头所提到的,FMCW雷达使用频率偏移来获得目标的距离。然而,由于多普勒效应,目标的运动也会引起频移。因此,拍频同时具有距离和速度信息。同时处理距离和多普勒让我们消除了这种模糊性。只要扫瞄足够快,使目标在多次扫瞄中保持在同一距离门内,多普勒可以在多次扫瞄中计算,然后用于修正初始距离估计。
渠道和目标
现在场景中有两辆目标车辆,标记为Car和Truck,每辆车辆都有一个关联的传播通道。该车在雷达车辆前方50米开始,以60公里/小时(16.7米/秒)的速度行驶。卡车在雷达车辆前方150米处开始,以130公里/小时(36.1米/秒)的速度行驶。
模式探索
通过辅助函数计算模型的几个对话框参数helperslexFMCWMultiTargetsParam.要从模型中打开函数,请单击修改仿真参数块。该函数在加载模型时执行一次。它向工作区导出一个结构,该结构的字段由对话框引用。要修改任何参数,可以在命令提示符更改结构中的值,或者编辑helper函数并重新运行它以更新参数结构。
结果和显示
下面显示的FMCW信号与前一个模型相同。

这两个目标可以在下面的距离多普勒图中看到。

地图正确地显示了两个目标:一个在50米处,另一个在150米处。由于雷达只能测量相对速度,这两辆车的预期速度值分别为11.1米/秒和-8.3米/秒,其中负号表示卡车正在远离雷达车。精确的速度估计可能很难从距离-多普勒图中推断出来,但估计的范围和速度在左侧模型的显示块中以数字形式显示。可以看出,速度估计值与期望值吻合得很好。
多目标MFSK雷达距离和速度估计
为了能够使用上述方法进行联合距离和速度估计,扫描需要相当快,以确保车辆在扫描过程中基本静止。这通常会转化为更高的硬件成本。MFSK是一种专门为汽车雷达设计的新波形,因此它可以实现较长扫瞄的同步距离和速度估计。
下面的例子展示了如何使用MFSK波形来执行距离和速度估计。场景设置与之前的模型相同。

该模型与前一个模型的主要区别在于波形块和信号处理子系统。MFSK波形基本上由两个具有固定频率偏移的FMCW扫频组成。在这种情况下,扫描发生在离散的步骤中。从MFSK波形块的参数,扫描时间可以计算为步长时间和每次扫描的步数的乘积。在本例中,扫描时间略高于2毫秒,这比前一个模型中使用的FMCW的7微秒要多几个数量级。有关MFSK波形的更多信息,请参见使用MFSK波形同时估计距离和速度的例子。

信号处理子系统描述如何处理MFSK波形的信号。信号首先在每一步结束采样,然后通过FFT转换到频域。一维CA CFAR检测器用于识别光谱中与目标相对应的峰值。然后利用每个峰值位置的频率和两次扫瞄之间的相位差来估计目标车辆的距离和速度。

模式探索
通过辅助函数计算模型的几个对话框参数helperslexMFSKMultiTargetsParam.要从模型中打开函数,请单击修改仿真参数块。该函数在加载模型时执行一次。它向工作区导出一个结构,该结构的字段由对话框引用。要修改任何参数,可以在命令提示符更改结构中的值,或者编辑helper函数并重新运行它以更新参数结构。
结果和显示
估计结果显示在模型中,与前一个模型得到的结果相匹配。
多目标的雷达距离、速度和角度估计
利用天线阵列可以提高雷达的角度分辨率。这个例子展示了如何解析在一辆携带天线阵列的车辆前面行驶在不同车道上的三辆目标车辆。

在这个场景中,雷达以100公里/小时(27.8米/秒)的速度在高速公路的中心车道上运行。第一辆目标车辆以85公里/小时(23.6米/秒)的速度在雷达的同一车道上向前行驶20米。第二辆目标车辆正以125公里/小时(34.7米/秒)的速度行驶在右侧车道,并在前方40米。第三辆目标车辆正以110公里/小时(30.6米/秒)的速度行驶在左侧车道,并在前方80米。雷达车的天线阵列是一个四元均匀线性阵列(ULA)。
场景坐标系的原点在雷达车辆上。目标车辆相对于雷达的地面真实距离、速度和角度为
范围(m)速度(米/秒)角(度 ) --------------------------------------------------------------- 汽车1 20 4.2 0 2 3 80.03 -2.8 1.4 40.05 -6.9 -2.9车
除了距离和多普勒处理外,信号处理子系统现在还包括到达方向估计。

处理过程与前面讨论的FMCW多目标模型非常相似。然而,在这个模型中,有5个阶段而不是4个。
阶段1:类似于前面讨论的FMCW多目标模型,这一阶段执行去捕获、数据立方形成和距离多普勒处理。然后将数据集传递给
范围的子集块,从而获得将要进行进一步处理的数据集的子集。第二阶段:第二阶段是
相移波束形成器块,其中基于在参数helper函数中定义的指定观察角度发生波束形成helperslexFMCWMultiTargetsDOAParam.阶段3:第三个阶段是进行检测处理的阶段。这个例子中的检测器也是
Ca cfar 2-d在距离和多普勒维度上都能工作的块。阶段4:集群发生在
DBSCAN Clusterer运算块使用的距离,多普勒和角度尺寸。控件显示聚类结果情节集群块。第五阶段:第四阶段,也是最后一个阶段,从距离多普勒图估计目标的距离和速度使用
区间估计而且多普勒估计量块,分别。此外,到达方向(DOA)估计是使用自定义块执行的,该块具有相控阵系统工具箱™根音乐估计器的实现。
模式探索
通过辅助函数计算模型的几个对话框参数helperslexFMCWMultiTargetsDOAParam.要从模型中打开函数,请单击修改仿真参数块。该函数在加载模型时执行一次。它向工作区导出一个结构,该结构的字段由对话框引用。要修改任何参数,可以在命令提示符更改结构中的值,或者编辑helper函数并重新运行它以更新参数结构。
结果和显示
模型的估计结果与预测值吻合较好。
总结
第一个模型展示了如何使用FMCW雷达来估计目标车辆的距离。从回声中得到的信息,如到目标车辆的距离,是完整的汽车ACC系统的必要输入。
该实例还讨论了如何进行距离-多普勒联合处理来获得目标车辆的距离和速度信息。然而,值得注意的是,当扫描时间较长时,系统的速度估计能力下降,联合处理有可能不再能对距离-多普勒耦合提供精确补偿。关于这个主题的更多讨论可以在MATLAB中找到基于FMCW技术的汽车自适应巡航控制的例子。
下面的模型展示了如何使用MFSK波形执行相同的范围和速度估计。该波形可以实现较长的扫描距离和速度估计,从而减少硬件要求。
最后一种型号是FMCW雷达,具有执行距离、速度和角度估计的天线阵列。
您也可以从以下列表中选择网站: