模拟和生成罗克韦尔自动化运动指令的结构化文本代码
这个例子展示了如何在Stateflow®中建模罗克韦尔自动化®运动指令。通过使用Simulink®PLC编码器™生成建模运动指令的结构化文本代码。
模型描述
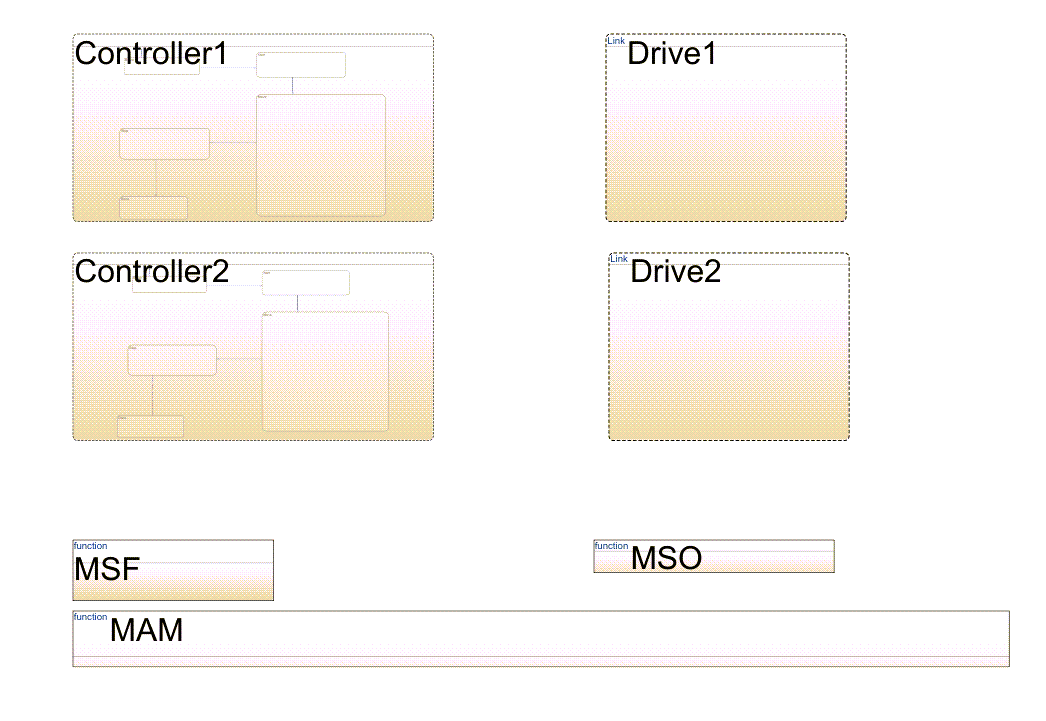
该模型由Stateflow®图表组成,称为MotionController.的MotionController图表由以下部分组成:
管理员一和Controller2模拟运动指令的子图。Drive1和Drive2模拟驱动器运动和执行运动控制的轴的子图。无国界医生组织,美索,老妈定义各自运动指令的图形函数。
打开模型:
load_system (“MotionControllerExample”);open_system (“MotionControllerExample / MotionController /图表”);
生成代码
为图表生成结构化文本代码plcgeneratemotionapicode功能:
警告(“关闭”,“plccoder: plccg_ext: AutomaticTypeConversions”);plcgeneratemotionapicode (“MotionControllerExample / MotionController”);
为“MotionController/MotionController”生成PLC代码。使用'MotionController'中的模型设置为PLC代码生成参数。开始为IDE studio5000生成代码。输出PLC代码到文件。“MotionController/MotionController”PLC代码生成成功。生成文件:plcsrc/MotionController。L5X
警告(“上”,“plccoder: plccg_ext: AutomaticTypeConversions”);
清理生成的文件
关闭模型并清理生成的文件:
close_system (“MotionControllerExample”);