IMU传感器融合与Simulink
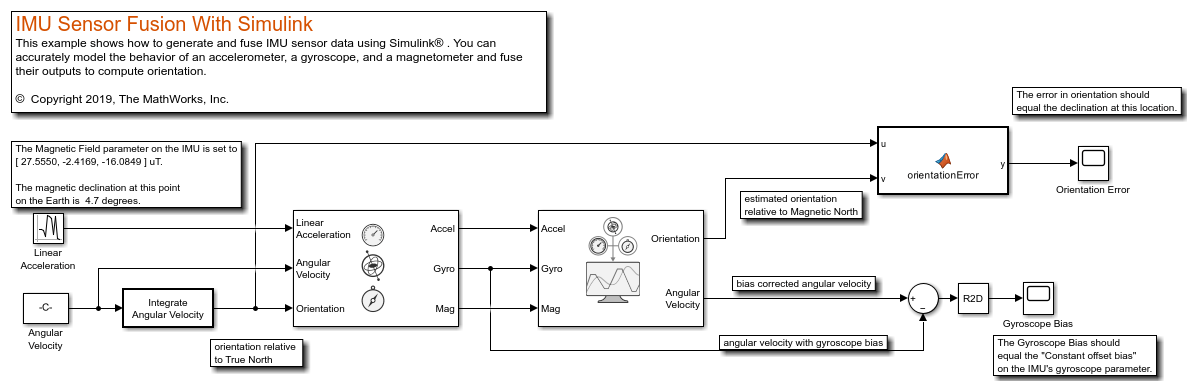
这个例子展示了如何使用Simulink®生成和融合IMU传感器数据。您可以精确地模拟加速度计、陀螺仪和磁强计的行为,并融合它们的输出来计算方向。
惯性测量单元
惯性测量单元(IMU)是由测量加速度的加速度计和测量角速度的陀螺仪组成的一组传感器。通常,还包括一个磁力计来测量地球的磁场。这三个传感器中的每个产生一个3轴测量,这三个测量组成一个9轴测量。
姿态航向和参考系统
姿态航向和参考系统(AHRS)获取9轴传感器读数并计算设备的方向。这个方向是相对于NED坐标系给出的,其中N是磁北方向。Simulink中的AHRS块使用间接卡尔曼滤波结构来实现这一点。
仿真软件系统
打开融合IMU传感器数据的Simulink模型
open_system (“IMUFusionSimulinkModel”);
输入和配置
IMU块的输入是设备的线性加速度、角速度和相对于导航框的方向。定位采用四元数(Simulink中的4乘1向量)或旋转矩阵(Simulink中的3乘3矩阵)的形式,将导航帧中的数量旋转到主体帧。在这个模型中,简单地对角速度进行积分来创建一个方向输入。角速度单位是rad/s,线加速度单位是m/s^2。因为AHRS只有一个与平移相关的输入(加速度计输入),它不能区分重力和线性加速度。因此,AHRS算法假设线性加速度是一个缓慢变化的白噪声过程。这是九轴融合算法的一个常见假设。
真北vs磁北
IMU块对话框中的磁场参数可以设置为本地磁场值。磁场值可以在美国国家海洋和大气管理局的网站或者使用wrldmagm功能在航空航天工具箱™。IMU块对话框上的磁场值对应于指向正北的完美磁强计的读数。因此,输入到IMU块的方向相对于内框,其中N为真北方向。然而,AHRS滤波器导航向磁北,这是典型的这种类型的滤波器。因此,输入到IMU的方向和AHRS输出的估计方向因真北和磁北的赤纬角而不同。
此模拟设置为 纬度和经度。该位置的磁场在IMU块中设置为[27.5550,-2.4169,-16.0849]微特斯拉。这个位置的赤纬约为
纬度和经度。该位置的磁场在IMU块中设置为[27.5550,-2.4169,-16.0849]微特斯拉。这个位置的赤纬约为
模拟
模拟模型。利用四元数距离比较了AHRS的IMU输入方向和估计输出方向。考虑到欧拉角奇点,这比差分欧拉角等价物更可取。
sim卡(“IMUFusionSimulinkModel”);
估计取向
估计方向与实际方向的差值应接近 也就是这个纬度和经度的赤纬。
也就是这个纬度和经度的赤纬。
陀螺仪的偏见
AHRS滤波器的第二个输出是偏置校正陀螺仪读数。在IMU块中,陀螺仪的偏置为0.0545 rad/s或3.125°g/s,这应该与系统中的稳态值相匹配陀螺仪的偏见块范围。
进一步练习
通过改变IMU上的参数,您应该会在AHRS的输出上看到相应的方向变化。您可以设置IMU块上的参数以匹配真正的IMU数据表,并调优AHRS参数以满足您的需求。
您也可以从以下列表中选择网站: