扬声器建模与Simscape™
这个例子展示了如何使用线性和非线性集总单元模型来建模一个动态扬声器。
扬声器建模介绍
动态扬声器驱动器利用电磁能量将电信号转换为声波,在锥形膜片中产生机械运动。因此,必须在模型中表示三个主要领域:电气、机械和声学,以及这些领域之间的双向能量转换。

扬声器常用的线性模型是将其表示为一个电路,这被称为集总元件模型。机械和声学效应是由数学上等价的电路模型来表示的。

对于电气模型,电机由音圈和磁铁组成。音圈是由电压驱动的 有一个抗性
有一个抗性 还有电感
还有电感 .这两个参数取决于钢丝材料、直径、长度、转弯半径、匝数和其他物理性质。磁体也对线圈电感有影响因为加入了铁芯。
.这两个参数取决于钢丝材料、直径、长度、转弯半径、匝数和其他物理性质。磁体也对线圈电感有影响因为加入了铁芯。
磁铁在缝隙中产生一个具有通量密度的场 .乘以导线长度
.乘以导线长度 ,这就是所谓的力因子
,这就是所谓的力因子 .这也是电域和机械域之间的转换因子,因为存在一个力
.这也是电域和机械域之间的转换因子,因为存在一个力 适用于音圈,其中
适用于音圈,其中 是施加在输入端的电流。相反,有一个电压
是施加在输入端的电流。相反,有一个电压 生成的
生成的 这类似于锥速。当将机械模型转换为电气模型时,它们之间的耦合由一个回转器表示,其中速度对应于电流,力对应于电压。
这类似于锥速。当将机械模型转换为电气模型时,它们之间的耦合由一个回转器表示,其中速度对应于电流,力对应于电压。
对于机械模型,集总电气元件被用作质量和柔度等机械特性的模拟物。首先,总移动质量的惯性(包括线圈、锥体和防尘帽)类似于电感的作用 在变化的电流上。第二,悬架和蜘蛛的刚度类似于电容器的效果
在变化的电流上。第二,悬架和蜘蛛的刚度类似于电容器的效果 .第三,悬架系统中的机械损耗类似于电阻
.第三,悬架系统中的机械损耗类似于电阻 .该机械模型形成谐振频率的电路
.该机械模型形成谐振频率的电路 ,这意味着驱动器的有效频率范围取决于其质量。
,这意味着驱动器的有效频率范围取决于其质量。
对于声学模型,驱动锥面与空气的界面类似于变压器。锥体越大,机械能转化为声能的越多(至少对于给定质量而言)。一个阻抗 (由
(由 ,
, 而且
而且 )模拟锥体前部和后部的辐射阻力。对于非封闭的驱动程序,这个值是非线性的,但相对较小。一个封闭的驱动器有一个固定的空气量,这就创建了一个由电容器建模的遵从性,任何空气泄漏(包括通风口)都会增加阻力.对于通风的外壳,大量的空气进出起着感应器的作用.
)模拟锥体前部和后部的辐射阻力。对于非封闭的驱动程序,这个值是非线性的,但相对较小。一个封闭的驱动器有一个固定的空气量,这就创建了一个由电容器建模的遵从性,任何空气泄漏(包括通风口)都会增加阻力.对于通风的外壳,大量的空气进出起着感应器的作用.
为简单起见,本例其余部分假设扬声器位于自由空间,即没有外壳( ).
).
模型电气部分的方程为:

模型中机械部分的方程为:

地点:
回转器的方程为:


线性扬声器模型
使用Simscape™,扬声器可以使用混合域方法(混合电气和机械域)建模,或者使用熟悉的将机械域转换为电气域的模型。
首先,直接使用回转器实现上面所示的电气模型。
模型=“LinearGyrator”;open_system(模型);sim(模式1);


close_system(模型中,0)
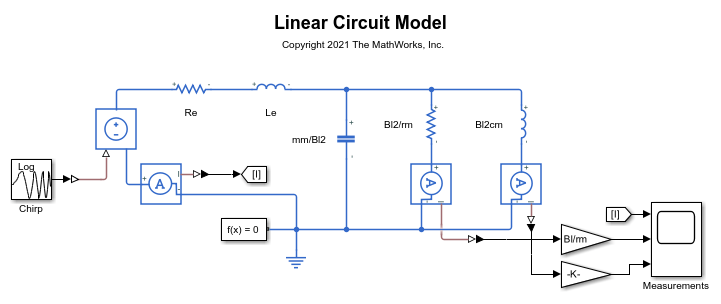
为了进行分析,通常通过重新安排电路拓扑结构和元件值来移除旋回器。

可以看出,该电路使用以下组件的行为与上述相同:



这个简化的电路产生了与以前完全相同的结果。
模型=“LinearCircuit”;open_system(模型);sim(模式1);

close_system(模型中,0)
Simscape™还允许混合电气和机械元素,因此扬声器模型可以在没有任何物理域转换的情况下进行模拟。同样,得到了相同的结果。
模型=“LinearMixedDomain”;open_system(模型);sim(模式1);


close_system(模型中,0)
其他元素可以很容易地添加到这个电路模型,以说明一个封闭或通风的外壳。
添加DSP到物理模型
除了在一个模拟中结合两个物理域外,还可以包括数字信号处理算法。下面的模型表示带有低音扬声器和高音扬声器的有源扬声器。在数字领域实现了交叉、参数EQ和搁置滤波器,随后为每个驱动器优化了功率放大器。分别测量每个驱动器的输出,并将组合输出与对数啁啾输入在频域进行比较。
模型=“MixedModeling”;open_system(模型);sim(模式3);




close_system(模型中,0)
非线性元素建模
一些扬声器元件是非线性的。例如,音圈的力因子和电感随其在磁体中的位置而变化。此外,悬架弹簧速率在其位移范围的末端发生变化。
前面模型中的线性组件可以被实现所需非线性的自定义版本所取代。例如,spring组件可以定义spring速率 作为
作为 ,在那里
,在那里 是位移和
是位移和 多项式系数(
多项式系数( 位移为0时的弹簧速率)。
位移为0时的弹簧速率)。
绘制柔顺度、力因子和电感的样本值。运行模型,实现了先前模型的“低音扬声器”驱动程序,但将三个线性组件替换为非线性组件。
plotNonLinearBHK;模型=“NonLinearBHK”;open_system(模型);sim(模式3);





close_system(模型中,0)
从这些示例开始,添加组件来建模外壳,或实现您自己的非线性元素。Simscape™将允许您使用您选择的领域(电气、机械)来完成此任务。您还可以在一个模型中测试所需的任何数字预处理。
定义
输入电压
输入电流
音圈电感
音圈电阻
力的因素
 施加在隔膜上的力
施加在隔膜上的力
隔膜速度
 隔膜位移
隔膜位移
移动质量
机械损失
悬挂合规
声阻抗
您也可以从以下列表中选择一个网站: