建模、仿真与控制“,
学习如何使用MATLAB®和仿真软件®建模、模拟和控制机器人和无人驾驶车辆。MathWorks专家和学生团队分享了如何开始使用MATLAB和Simulink进行基于模型的机器人和无人系统设计的提示和技巧。
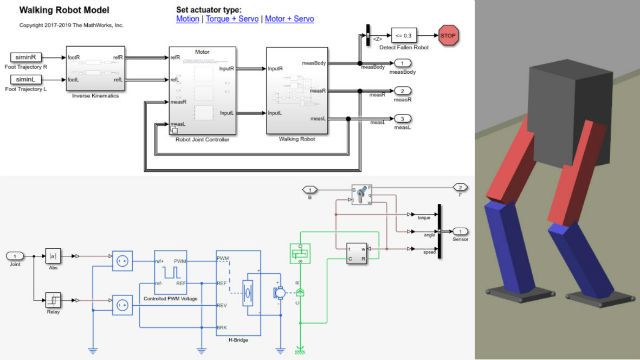
步行机器人建模与仿真了解如何使用Simscape建模一个双足步行机器人,包括物理接触力,执行器模型和控制器。
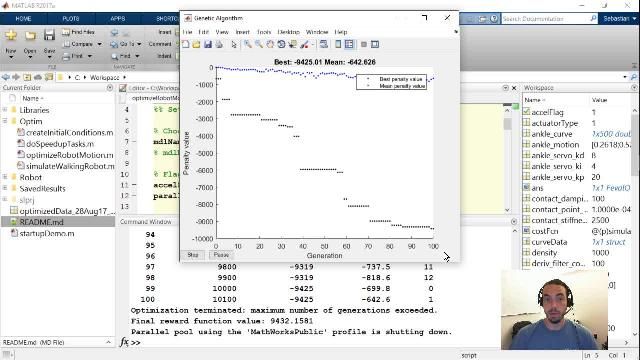
优化行走机器人轨迹加入Sebastian Castro,因为他向您展示了如何使用MATLAB和全局优化工具箱来寻找行走机器人的Simulink模型的最佳运动轨迹。
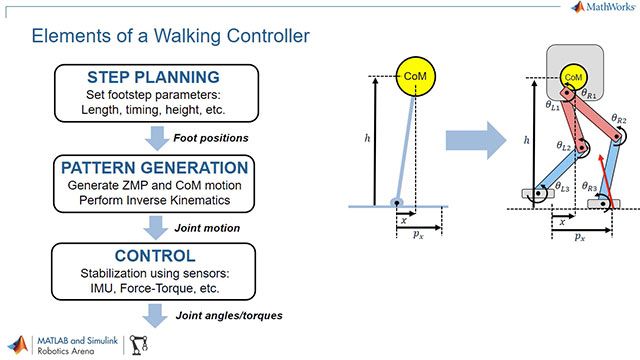
步行机器人图形生成学习如何使用MATLAB和Simulink来设计人形机器人的行走模式生成器。
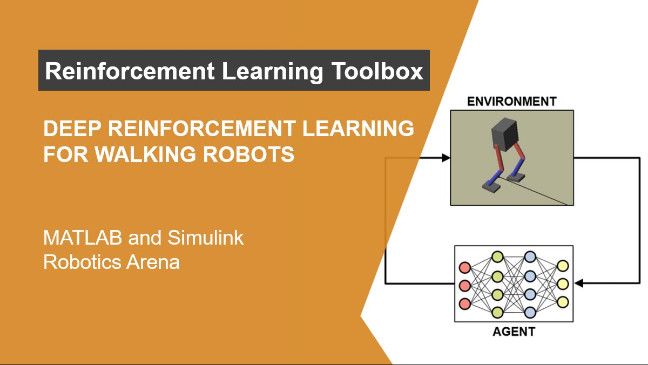
行走机器人的深度强化学习使用MATLAB、Simulink和强化学习工具箱,利用深度强化学习训练类人机器人的控制策略。
基于模型的人形行走控制在MATLAB和Simulink中学习如何使用线性倒立摆模型(LIPM)来设计人形行走模式。
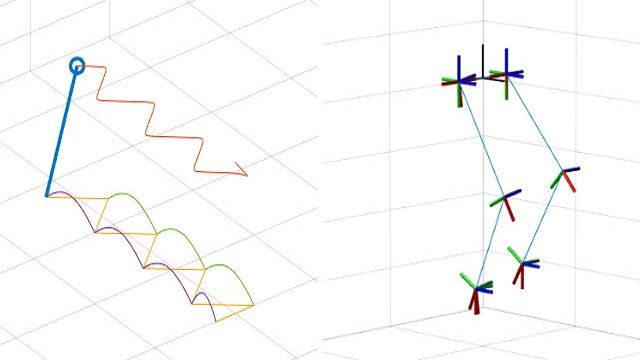
用MATLAB和Simulink仿真移动机器人学习如何使用MATLAB中央文件交换上的移动机器人仿真工具箱。
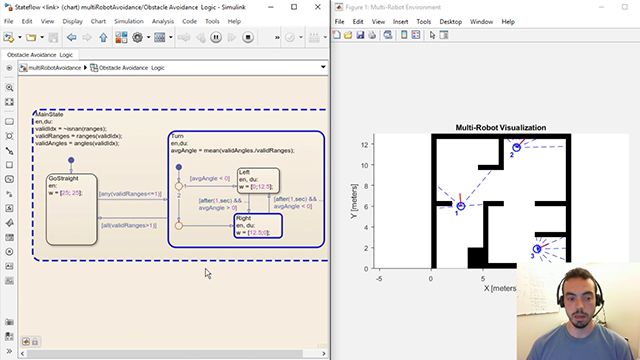
编程机器人成群探索如何使用MATLAB和Simulink进行机器人群体行为的原型设计和实现。
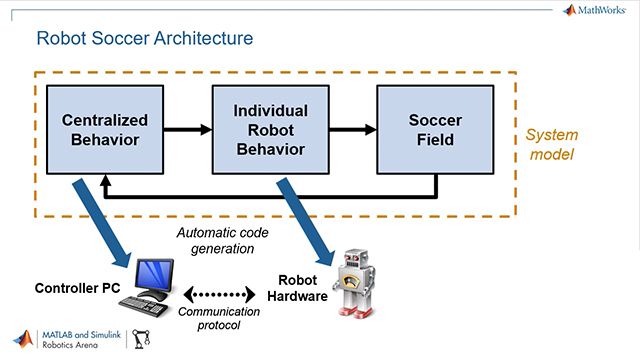
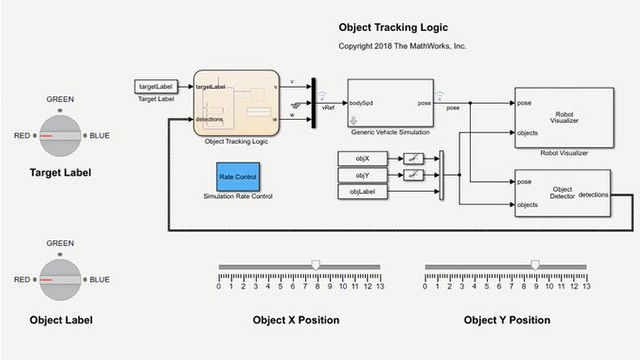
足球机器人行为编程通过自主足球机器人的实例,探讨如何使用MATLAB和Simulink进行多智能体系统的原型设计和实现。
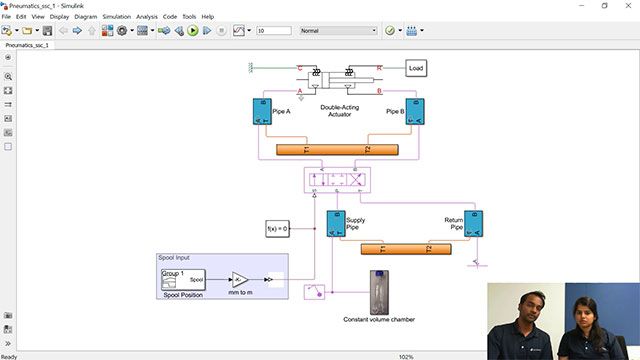
模拟气动机器人执行器Veer和Maitreyee展示了如何使用Simscape中可用的物理块来建模气动系统。
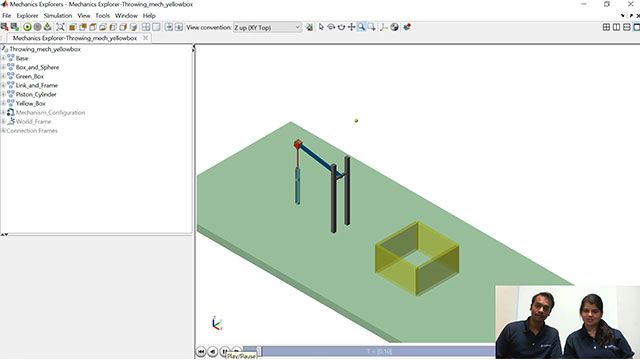
模拟机器人投掷机构Veer和Maitreyee向您展示了如何使用Simscape Multibody构建投掷机制,将球扔向特定目标。
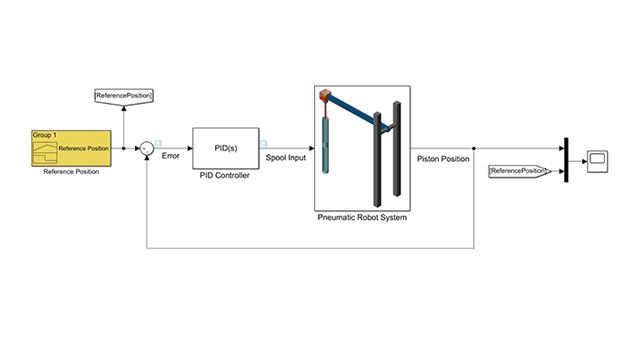
机器人投掷系统的控制设计Veer和Maitreyee首先展示了如何使用Simscape中建模的物理效果扩展Simscape多体投掷机制模型。然后在系统中实现控制器对参考活塞位置的跟踪。
控制机器人机械手关节了解MATLAB、Simulink和Robotics System Toolbox如何帮助您设计机器人操作和抓取任务的关节力矩控制器。
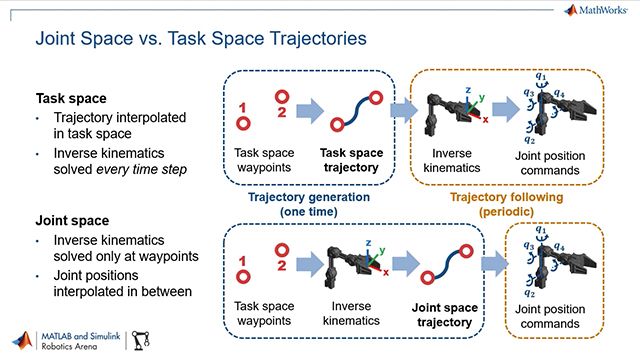
机械手的轨迹规划Sebastian Castro讨论了MATLAB和Simulink如何帮助您设计、计划和验证机器人操作任务的运动轨迹。
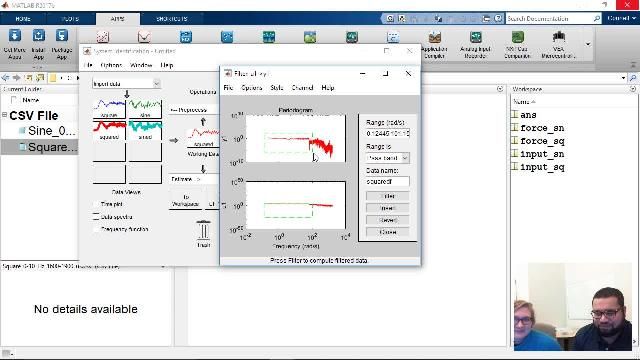
蓝色机器人推进器的系统辨识使用System Identification应用程序根据输入和输出数据为一块硬件创建模型。Connell D’souza和Kris Fedorenko解释了从数据收集到模型评估的工作流程。
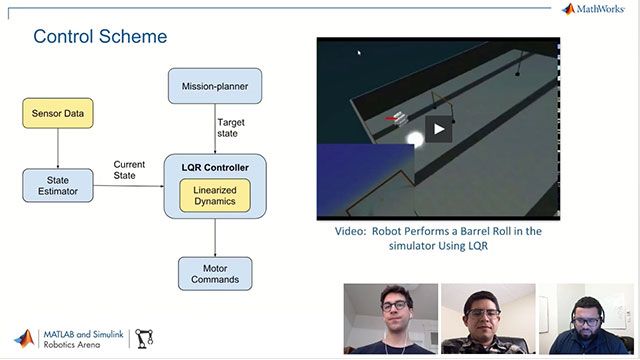
自主水下航行器LQR控制跟随自主机器人航行器项目的Juan Rojas和Nathan Liebrecht学习实现自主水下航行器线性-二次调节器(LQR)控制器的基础知识。
自主水下航行器的建模与仿真MathWorks工程开发组的Yashodhar Veeralla将与Connell D’souza一起讨论如何使用Aerospace Blockset进行基于模型的设计,以及自主水下航行器(AUV)的仿真和控制。
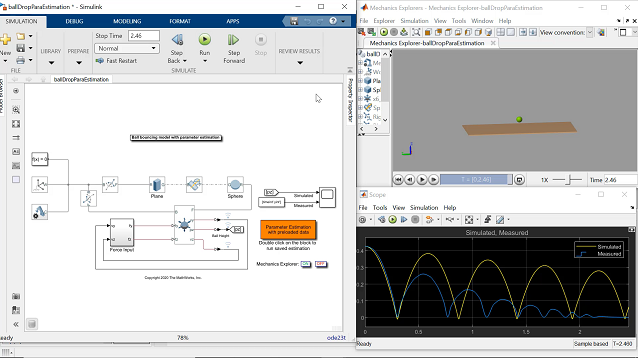
估计弹跳球接触参数本视频展示了使用Simscape多体来寻找最佳接触参数的工作流程,可以模拟反弹或碰撞球的真实行为。
机器人机械手算法设计通过使用机器人系统工具箱功能和集成机器人模型与仿真工具来编程和测试操作任务,加速机器人机械手算法的设计。
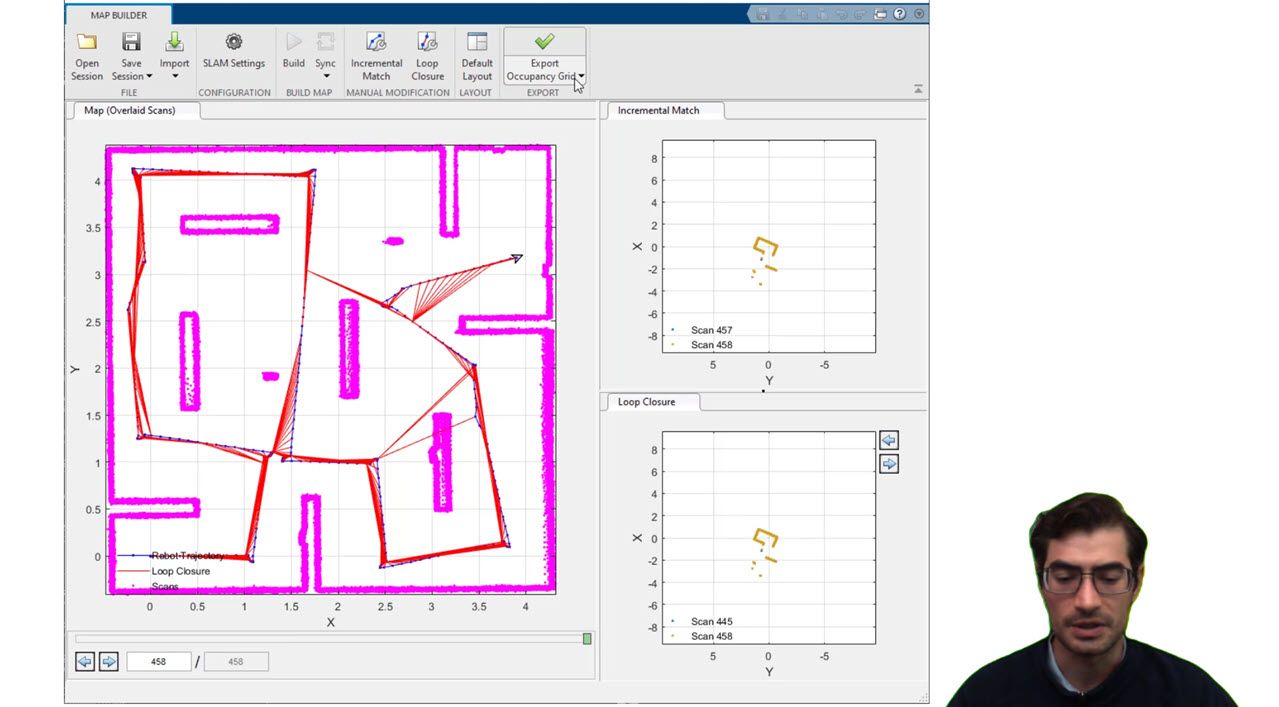
移动机器人和UGV的测绘学习如何使用MATLAB、Simulink和ros支持的系统为移动机器人和无人地面车辆的自主导航创建和模拟数字地图表示。
您也可以从以下列表中选择网站: