“移动机器人控制”课件
课程材料包括:
- 教学大纲
- 实验室手册
- 7软件实验室
移动机器人的控制
马格努斯Egerstedt教授
j·p·德拉·克罗伊
电气与计算机工程
乔治亚理工学院
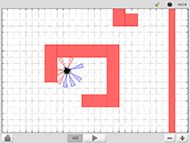
Sim.I.am是一个机器人模拟器,在移动机器人控制MOOC中作为理论和实践之间的教育桥梁,可以用来学习如何将控制应用到移动机器人。该应用程序是一个多代理应用程序的演示,其中一个机器人跟随另一个机器人在混乱的环境中穿行。屏幕上的说明也包括在内。包括一个手册,以帮助学习如何使用模拟器。它还提供了一组编程练习,重点是如何从零开始实现移动机器人导航系统(在应用程序中可以找到)。
学习成果
在成功完成课程后,学生将能够为许多不同的机器人平台和应用程序选择、设计、分析、实现和评估有效的控制器。
您也可以从以下列表中选择网站: